このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
クアッドコプターの機体
機体モデルを実装するには、これら 2 つのアプローチのいずれかを使用できます。
非線形機体
非線形機体の場合、モデルは重力、プロファイル抗力、および空力とモーメントを計算します。
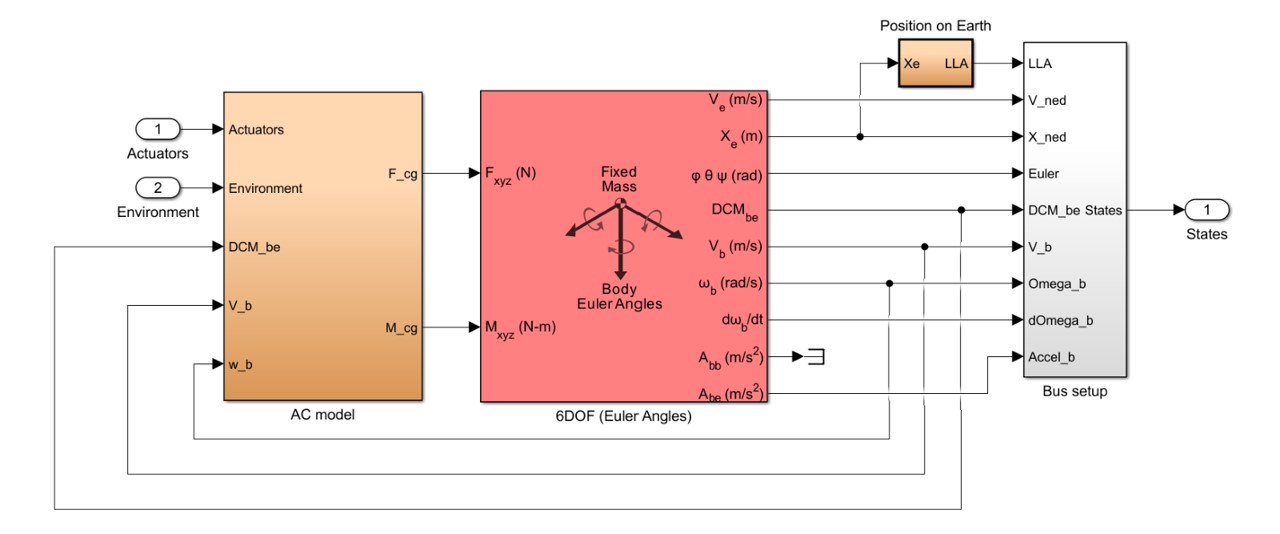
AC Model サブシステムは、次の式を使用して合計力を計算します。
重力: 、ここで m はクアッドコプターの質量、g は重力による加速度です。
プロファイル抗力: 、ここで ρ は大気密度、V は物体の速度、S は基準面積、Cd は抗力係数です。
空力とモーメント:フラップ効果を含めた Multirotor ブロックを使用して計算されます。
6DOF (Quaternion) ブロックは、機体の運動方程式を積分して、各時点における状態を取得します。
非線形ワークフローは、3 次元空間におけるドローンの動的な動作を正確に表現します。6DOF (Quaternion) ブロックは、四元数を使用して 3D 環境におけるドローンの向きと位置を表し、ドローンの動きと向きをより堅牢に表現します。
リニア機体
線形機体の場合、アクチュエータ入力のトリム値、環境パラメーター値、および線形化モデルの状態空間 A、B、C、D 行列は、MAT ファイル linearizedAirframe に保存されます。これらの値は、クアッドコプターの非線形モデルを Simulink® Control Design™.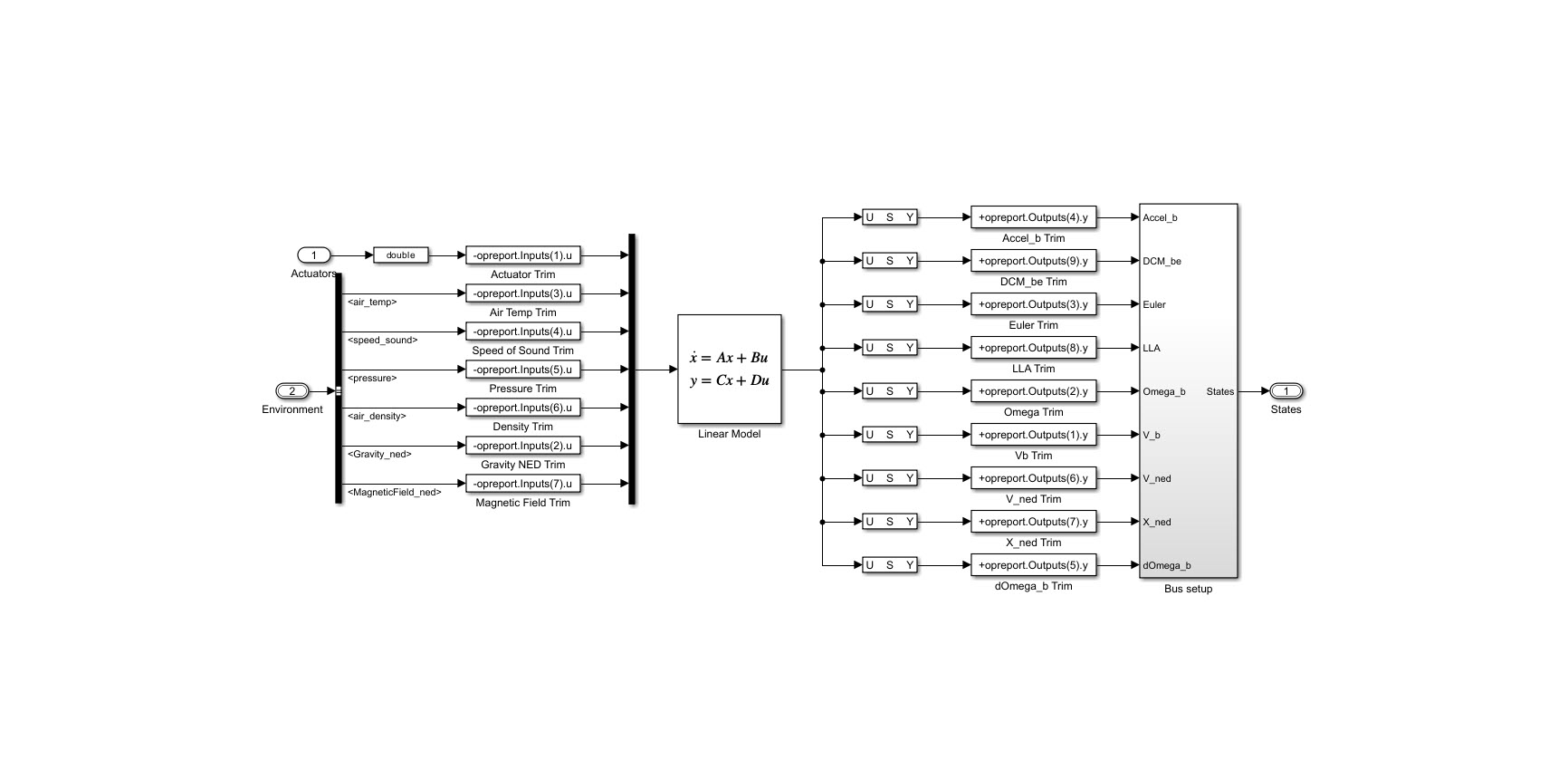 を使用して線形化する
を使用して線形化する trimLinearizeOpPoint 関数を使用して計算されます。