このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
Multirotor
ライブラリ:
Aerospace Blockset /
Propulsion
説明
Multirotor ブロックは、クワッドコプターなどの複数の回転プロペラまたはローターによって生成される空気力とモーメントを 3 次元すべてで計算します。簡略化されたフラップ、または定常状態の空気力学を含めることもできます。
制限
ブロックは、定常フラップ効果を含めるオプションを備えた簡略化されたアプローチに従います。動的なフラップ、ラグ、またはブレードのフェザリング動作はモデル化されません。
ブロックはピッチ角入力の変化を直接考慮しませんが、ブレードのねじれを変化させることで近似解析を実行することができます。
ブロックは Twist distribution を使用して、線形または理想的なツイスト分布のみをモデル化します。このブロックは、ブレード弦長と揚力曲線の勾配が一定であると想定しています。
ブロックには、モデル内の干渉効果(ローター間)は含まれません。
端子
入力
出力
パラメーター
アルゴリズム
p 1=(d,-d,-h)
p 2=(d,d,-h)
p 3=(-d,d,-h)
p 4=(-d,-d,-h)
ここで、
lは腕の長さです。
h は車両の重心からのオフセットです。
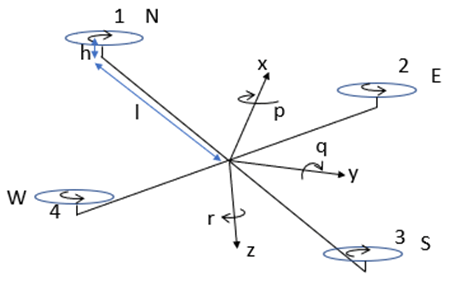
このグラフィックでは:
x 軸、y 軸、z 軸は互いに垂直です。
車両の 4 本のアームは垂直で、長さが等しい (l)。
すべてのプロペラは同じ高さにあります (h)。
p 1=(l,0,h)
p 2=(0,l,h)
p 3=(-l,0,h)
p 4=(0,-l,h)
ここで、
lは腕の長さです。
h は車両の重心からのオフセットです。
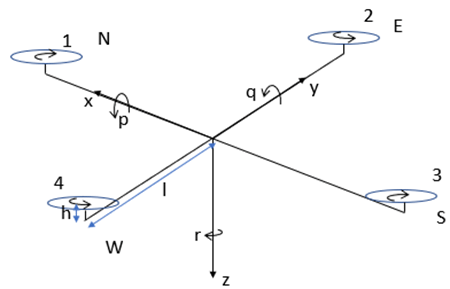
このグラフィックでは:
x 軸、y 軸、z 軸は互いに垂直です。
車両の 4 本のアームは垂直で、長さが等しい (l)。
すべてのプロペラは同じ高さにあります (h)。
参照
[1] Pounds, P. E. I. (2007). Design, construction and control of a large quadrotor micro air vehicle (Doctoral dissertation, Australian National University).
[2] Riether, F. (2016). Agile quadrotor maneuvering using tensor-decomposition-based globally optimal control and onboard visual-inertial estimation (Doctoral dissertation, Massachusetts Institute of Technology).
バージョン履歴
R2023a で導入