unet
構文
説明
unetNetwork = unet(imageSize,numClasses)
unet を使用して、U-Net ネットワーク アーキテクチャを作成します。Deep Learning Toolbox™ の関数 trainnet (Deep Learning Toolbox) を使用してネットワークに学習させなければなりません。
[ は、U-Net ネットワークからの出力サイズも返します。unetNetwork,outputSize] = unet(imageSize,numClasses)
___ = unet( は、1 つ以上の名前と値の引数を使用してオプションを指定します。たとえば、imageSize,numClasses,Name=Value)unet(imageSize,numClasses,NumFirstEncoderFilters=64) は、最初の符号化器ステージの出力チャネルの数を 64 として指定します。
例
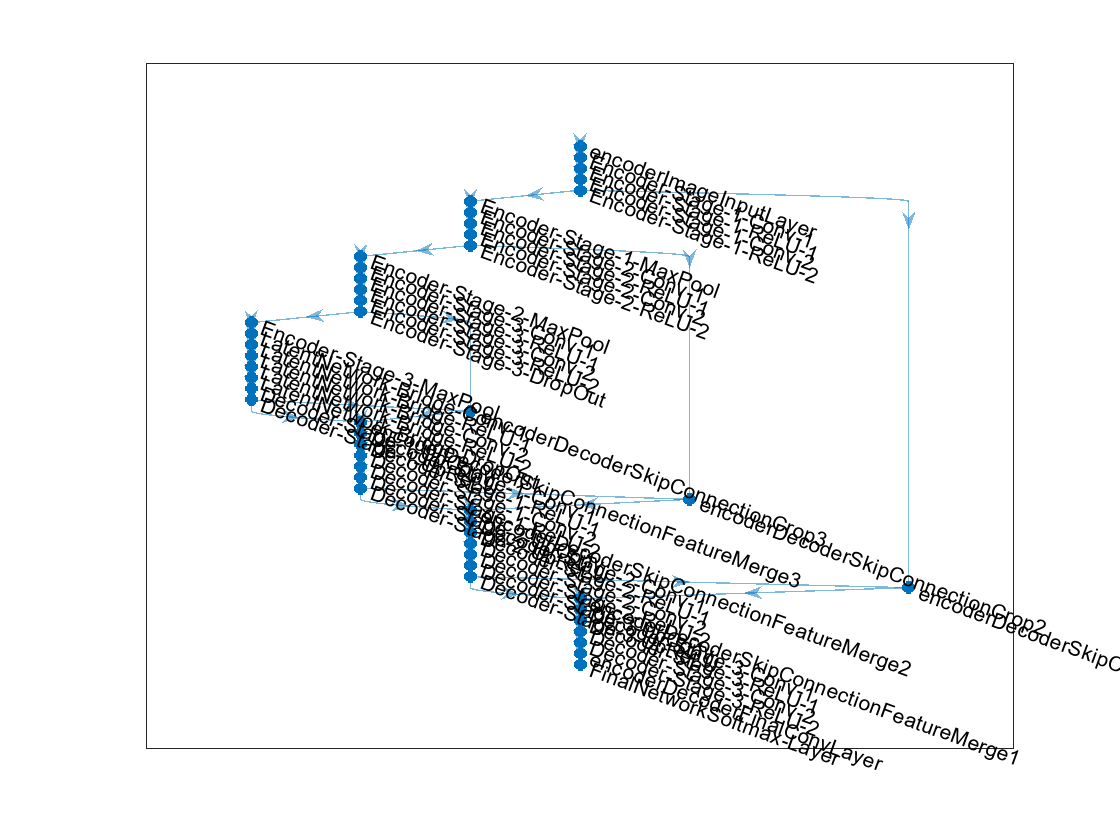
深さ 3 の符号化器/復号化器を持つ U-Net ネットワークを作成します。
imageSize = [480 640 3]; numClasses = 5; encoderDepth = 3; unetNetwork = unet(imageSize,numClasses,EncoderDepth=encoderDepth)
unetNetwork =
dlnetwork with properties:
Layers: [48×1 nnet.cnn.layer.Layer]
Connections: [53×2 table]
Learnables: [36×3 table]
State: [0×3 table]
InputNames: {'encoderImageInputLayer'}
OutputNames: {'FinalNetworkSoftmax-Layer'}
Initialized: 1
View summary with summary.
ネットワークを表示します。
plot(unetNetwork)
学習イメージとピクセル ラベルをワークスペースに読み込みます。
dataSetDir = fullfile(toolboxdir("vision"),"visiondata","triangleImages"); imageDir = fullfile(dataSetDir,"trainingImages"); labelDir = fullfile(dataSetDir,"trainingLabels");
学習イメージを保存する imageDatastore オブジェクトを作成します。
imds = imageDatastore(imageDir);
クラス名と関連するラベル ID を定義します。
classNames = ["triangle","background"]; labelIDs = [255 0];
学習イメージのグラウンド トゥルース ピクセル ラベルを保存する pixelLabelDatastore オブジェクトを作成します。
pxds = pixelLabelDatastore(labelDir,classNames,labelIDs);
U-Net ネットワークを作成します。
imageSize = [32 32]; numClasses = 2; unetNetwork = unet(imageSize, numClasses)
unetNetwork =
dlnetwork with properties:
Layers: [61×1 nnet.cnn.layer.Layer]
Connections: [68×2 table]
Learnables: [46×3 table]
State: [0×3 table]
InputNames: {'encoderImageInputLayer'}
OutputNames: {'FinalNetworkSoftmax-Layer'}
Initialized: 1
View summary with summary.
ネットワークに学習させるためのデータストアを作成します。
ds = combine(imds,pxds);
学習オプションを設定します。
options = trainingOptions("sgdm", ... InitialLearnRate=1e-3, ... MaxEpochs=20, ... VerboseFrequency=10);
ネットワークに学習をさせます。
net = trainnet(ds,unetNetwork,"crossentropy",options) Iteration Epoch TimeElapsed LearnRate TrainingLoss
_________ _____ ___________ _________ ____________
1 1 00:00:05 0.001 3.2975
10 10 00:00:48 0.001 0.6778
20 20 00:01:36 0.001 0.27066
Training stopped: Max epochs completed
net =
dlnetwork with properties:
Layers: [61×1 nnet.cnn.layer.Layer]
Connections: [68×2 table]
Learnables: [46×3 table]
State: [0×3 table]
InputNames: {'encoderImageInputLayer'}
OutputNames: {'FinalNetworkSoftmax-Layer'}
Initialized: 1
View summary with summary.
入力引数
名前と値の引数
出力引数
詳細
ヒント
畳み込み層で
'same'パディングを使用すると、入力から出力まで同じデータ サイズが維持され、幅広い入力イメージ サイズの使用が可能になります。大きなイメージをシームレスにセグメント化するにはパッチベースのアプローチを使用します。関数
randomPatchExtractionDatastoreを使用してイメージ パッチを抽出できます。パッチベースのアプローチを使用してセグメンテーションを行う際に、境界のアーティファクトが生じるのを防ぐには、
'valid'パディングを使用します。unet関数を使用して作成したネットワークは、trainnet(Deep Learning Toolbox) で学習させた後、GPU コード生成に使用できます。詳細と例については、コード生成と深層ニューラル ネットワークの展開 (Deep Learning Toolbox)を参照してください。
参照
[1] Ronneberger, O., P. Fischer, and T. Brox. "U-Net: Convolutional Networks for Biomedical Image Segmentation." Medical Image Computing and Computer-Assisted Intervention (MICCAI). Vol. 9351, 2015, pp. 234–241.
[2] He, K., X. Zhang, S. Ren, and J. Sun. "Delving Deep Into Rectifiers: Surpassing Human-Level Performance on ImageNet Classification." Proceedings of the IEEE International Conference on Computer Vision. 2015, 1026–1034.
拡張機能
バージョン履歴
R2024a で導入
参考
オブジェクト
dlnetwork(Deep Learning Toolbox)
関数
trainnet(Deep Learning Toolbox) |deeplabv3plus|unet3d|pretrainedEncoderNetwork|semanticseg|evaluateSemanticSegmentation
トピック
- 深層学習を使用したマルチスペクトル イメージのセマンティック セグメンテーション
- 深層学習を使用したセマンティック セグメンテーション入門
- MATLAB による深層学習 (Deep Learning Toolbox)