detect
Syntax
Description
keypoints = detect(detector,I,bboxes)I, using an HRNet
object keypoint detector, detector. The detect
function automatically resizes and rescales the input to match the size of the images used
to train the detector. The function returns the locations of keypoints detected in each
input image as a set of object keypoints.
[
returns the detection confidence score for each keypoint. The confidence score determines
the location accuracy of the detected keypoint. The value of keypoint confidence score is
in the range of [0, 1]. A higher score indicates greater confidence in the
detection.keypoints,scores] = detect(detector,I,bboxes)
detectionResults = detect(___,Name=Value)
Examples
Read a sample image into the workspace.
I = imread("visionteam.jpg");Crop and display one person from the image.
personBox = [262.5 19.51 127.98 376.98]; [personImg] = imcrop(I,personBox); figure imshow(personImg)

Specify a bounding box for the person in the image. You can use the bounding box region as input to the object keypoint detector to detect the person.
bbox = [3.87,21.845,118.97,345.91];
Load a pretrained HRNet object keypoint detector.
keypointDetector = hrnetObjectKeypointDetector("human-full-body-w32");Detect the keypoints of the person in the image by using the pretrained HRNet object keypoint detector.
[keypoints,keypointScores,valid] = detect(keypointDetector,personImg,bbox)
keypoints = 17×2 single matrix
72.8781 40.7078
77.1927 36.2037
63.9647 36.2037
86.2008 45.2118
55.2407 40.7078
100.2811 85.7481
33.9517 76.7401
114.5508 135.2925
17.5455 135.2925
102.2699 180.3329
43.3386 103.7643
89.3260 193.8450
45.1380 189.3410
90.9360 270.4136
38.0240 270.4136
⋮
keypointScores = 17×1 single column vector
0.9616
0.9819
0.9797
0.9824
0.9627
0.9540
0.8812
0.9696
0.9909
0.9675
0.9327
0.8247
0.8356
0.9527
0.9111
⋮
valid = 17×1 logical array
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
⋮
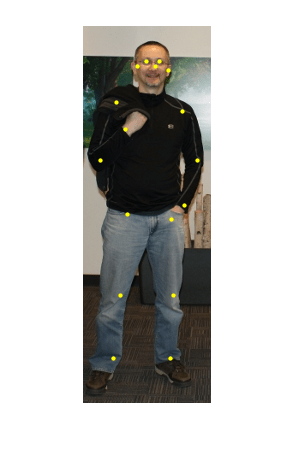
Insert the person keypoints into the image and display the results.
detectedKeypoints = insertObjectKeypoints(personImg,keypoints,KeypointColor="yellow",KeypointSize=2);
imshow(detectedKeypoints)