このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
Vehicle Dynamics Blockset の 3D シミュレーションの仕組み
車両運動モデルでは、フォトリアリスティックな 3D 可視化環境でプログラム可能な操作を実行します。Vehicle Dynamics Blockset™ による 3D シミュレーション環境と Simulink® の統合により、知覚、制御、計画のアルゴリズムをバーチャルにテストするために車両の周囲の環境を照会できます。Vehicle Dynamics Blockset 可視化環境では、Epic Games® の Unreal Engine® を使用します。
このシミュレーション環境の仕組みを理解すると、問題のトラブルシューティングやモデルのカスタマイズに役立ちます。
3D シミュレーション環境との通信
Vehicle Dynamics Blockset を使用してアルゴリズムを実行すると、Simulink は可視化エンジンでアルゴリズムをコシミュレートします。
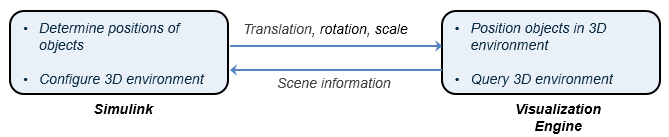
Simulink 環境で、Vehicle Dynamics Blockset は以下を行います。
3D 可視化環境のフィードバックと車両運動モデルを使用してオブジェクトの次の位置を判別する。
3D 可視化環境を構成する (具体的には次のとおり):
レイ トレーシング
シーン取得用のカメラ
オブジェクトの初期位置
可視化エンジン環境で、Vehicle Dynamics Blockset はオブジェクトを配置し、レイ トレーシングを使用して環境を照会します。
次の図は、Simulink と可視化エンジンの間の通信をまとめたものです。
ブロックの実行順序
シミュレーション中に、3D シミュレーション ブロックは次の特定の実行順序に従います。
車両ブロックが車両を初期化し、その信号データ [X]、[Y]、[ヨー] を Simulation 3D Scene Configuration ブロックに送信する。
Simulation 3D Scene Configuration ブロックが車両データを受信してセンサー ブロックに送信する。
センサー ブロックが車両データを受信し、そのデータを使用して車両の位置を正確に特定して可視化する。
ブロックの [優先順位] プロパティにより、この実行順序を制御します。任意のブロックのこのプロパティにアクセスするには、ブロックを右クリックして [プロパティ] を選択し、[一般] タブをクリックします。既定では、Simulation 3D Vehicle with Ground Following ブロックの優先順位は -1、Simulation 3D Scene Configuration ブロックの優先順位は 0、センサー ブロックの優先順位は 1 です。
センサーがシーン内の車両を検出していない場合、3D シミュレーション ブロックの実行順序が正しくない可能性があります。実行順序を更新して再度シミュレートしてみてください。実行順序の詳細については、実行順序の制御と表示を参照してください。
また、すべての 3D シミュレーション ブロックが同じサブシステム内に配置されていることを確認してください。ブロックの [優先順位] 設定が正しくても、異なるサブシステム内に配置されている場合は、実行順序が正しくなくなることがあります。
関連する例
詳細
外部の Web サイト
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)