Simulation 3D Tractor
3D 環境でのトラクターの実装
ライブラリ:
Vehicle Dynamics Blockset /
Vehicle Scenarios /
Sim3D /
Sim3D Vehicle /
Components
説明
メモ
Simulation 3D Tractor ブロックを含むモデルのシミュレーションには、Simulink® 3D Animation™ が必要です。
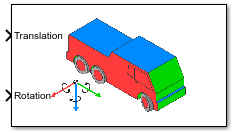
Simulation 3D Tractor ブロックは、3D シミュレーション環境に 3 車軸トラクターを実装します。
Simulation 3D Tractor ブロックを使用するには、必ず Simulation 3D Scene Configuration ブロックをモデルに含めます。Simulation 3D Tractor ブロックの [サンプル時間] パラメーターを -1 に設定すると、ブロックは Simulation 3D Scene Configuration ブロックに指定されているサンプル時間を使用します。
ブロックの入力には、SAE J6701 で定義されている、Z が下向きとなる "右手" (RH) "直交" の車両座標系を使用します。この座標系は慣性系であり、初期状態で車両の幾何学的中心に一致します。
"X" 軸 — 車両の縦軸に沿い、前方向を指します。
"Y" 軸 — 車両の横軸に沿い、右を指します。
"Z" 軸 — 下を指します。
ヒント
Simulation 3D Tractor ブロックが Simulation 3D Scene Configuration ブロックの前に実行されることを確認します。これにより、Simulation 3D Vehicle で準備された信号データが Unreal Engine® 3D 可視化環境で受信されます。ブロックの実行順序を確認するには、ブロックを右クリックして [プロパティ] ボタン  をクリックします。[一般] タブで、[優先順位] の設定が次のようになっていることを確認します。
をクリックします。[一般] タブで、[優先順位] の設定が次のようになっていることを確認します。
Simulation 3D Scene Configuration —
0Simulation 3D Tractor —
-1
実行順序の詳細については、実行順序の制御と表示を参照してください。
例

3 車軸トレーラーを牽引する 3 車軸トラクター
商用トラック向けの 3 車軸トレーラーを牽引する 3 車軸トラクターをシミュレート。ヒッチ サブシステム、正弦波ステアリング テストまたはブレーキ テスト、およびトラクターの後輪に加わる車軸トルクを実装。
端子
入力
パラメーター
参照
[1] Vehicle Dynamics Standards Committee. Vehicle Dynamics Terminology. SAE J670. Warrendale, PA: Society of Automotive Engineers, 2008.
[2] Technical Committee. Road vehicles — Vehicle dynamics and road-holding ability — Vocabulary. ISO 8855:2011. Geneva, Switzerland: International Organization for Standardization, 2011.