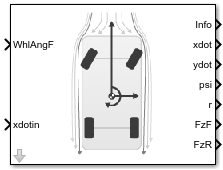
Vehicle Body 3DOF
縦方向運動、横方向運動、ヨー運動を計算するための 3DOF 剛体車体
ライブラリ:
Vehicle Dynamics Blockset /
Vehicle Body
説明
Vehicle Body 3DOF ブロックは、縦方向運動、横方向運動、およびヨー運動を計算するための剛体の 2 車軸車体を実装します。このブロックは、車体の質量および加速とステアリングによる車軸間の空力抵抗を考慮します。
このブロックは Vehicle Dynamics Blockset™ 車両座標系を使用します。車両座標系の軸 ("XV"、"YV"、"ZV") は、車両に付加された基準座標系で固定されます。この座標系は SAE J670 規格に準拠しており、X 前方、Y 右方向、Z 下方向の向きで、原点はバネ上質量の重心にあります。ステアリング角度の符号の規則は右方向を正とします。
このブロックを車両運動や自動運転の調査で使用して、車両のピッチ運動、ロール運動、および垂直運動が重要な意味をもたない場合の非ホロノミックな車両運動をモデル化します。
Vehicle Dynamics Blockset ライブラリには、縦方向運動、横方向運動、ヨー運動をモデル化する 2 つのタイプの Vehicle Body 3DOF ブロックがあります。
| ブロック | [車両 Track] の設定 | 実装 |
|---|---|---|
Vehicle Body 3DOF Single Track |
|
|
Vehicle Body 3DOF Dual Track |
| 車両の四隅または "ハードポイント" に力が作用します。 |

[車軸の力] パラメーターを使用して力のタイプを指定します。
| [車軸の力] の設定 | 実装 |
|---|---|
|
|
|
|
|
|
次のブロック パラメーターを使用して、追加の入力端子を作成できます。次の表は、設定をまとめています。
[入力信号] ペインのパラメーター | 入力端子 | 説明 |
|---|---|---|
前輪ステアリング |
| 前輪角度、δF |
| 後輪ステアリング | WhlAngR | 後輪角度、δR |
| 外力 | FExt | 車両固定座標系での車両重心 (CG) に作用する外力、Fx、Fy、Fz |
| 外部モーメント |
| 車両固定座標系での車両 CG を中心とする外部モーメント、Mx、My、Mz |
| リア ヒッチ力 | Fh | 車両固定座標系におけるヒッチ位置で車体に加わるヒッチ力、Fhx、Fhy、Fhz |
| リア ヒッチ モーメント | Mh | 車両固定座標系におけるヒッチ位置でのヒッチ モーメント、Mhx、Mhy、Mhz |
風 |
| 慣性基準座標系での風速、WX、WY、WZ |
気温 | AirTemp | 周囲の気温。実行時に気温を変化させる場合に、このオプションを検討します。 |
| 摩擦 | Mu | 地面摩擦係数 |
前後方向の位置 |
| 地球固定の "X" 軸に沿った車両 CG の初期変位 |
左右方向の位置 |
| 地球固定の "Y" 軸に沿った車両 CG の初期変位 |
ヨー角 |
| 地球固定の "Z" 軸を中心とする車両固定座標系の初期回転 (ヨー) |
前後方向の速度 |
| 車両固定の "x" 軸に沿った車両 CG の初期速度 |
左右方向の速度 |
| 車両固定の "y" 軸に沿った車両 CG の初期速度 |
ヨー レート |
| 車両固定の "z" 軸を中心とする車両の初期角速度 (ヨー レート) |
運動方程式
Vehicle Body 3DOF ブロックは、縦方向運動、横方向運動、およびヨー運動を計算するための剛体の 2 車軸車体を実装します。このブロックでは、車体の質量、空力抵抗、および加速とステアリングによる車軸間の重量分散が考慮されます。ブロックは車両運動を特定するために、シングル トラック (二輪)、四輪、および抗力の次の計算式を実装します。
シングル トラック (二輪)
| 計算 | 説明 |
|---|---|
| ダイナミクス | このブロックは次の式を使用して、剛体の平面上のダイナミクスを計算します。 [車軸の力] を [車軸の力] を |
| 外力 | 外力には、抗力と外力の両方の入力が含まれます。これらの力は、車両 CG に作用します。 [車軸の力] を [車軸の力] を このブロックは垂直抗力を定格垂直負荷で除算し、重量および負荷の移動時における有効な摩擦パラメーターを変化させます。このブロックは次の式を使用して、ピッチとロールの平衡を維持します。 |
| タイヤの力 | このブロックは縦方向と横方向のローカル速度の比を使用して、スリップ角を求めます。 このブロックは、タイヤの力を求めるためにスリップ角を使用します。 [車軸の力] を |
四輪
| 計算 | 説明 |
|---|---|
ダイナミクス | このブロックは次の式を使用して、剛体の平面上のダイナミクスを計算します。 [車軸の力] を |
外力 | 外力には、抗力と外力の両方の入力が含まれます。これらの力は、車両 CG に作用します。 [車軸の力] を [車軸の力] を このブロックは垂直抗力を定格垂直負荷で除算し、重量および負荷の移動時における有効な摩擦パラメーターを変化させます。このブロックは次の式を使用して、ピッチとロールの平衡を維持します。 |
タイヤの力 | このブロックは縦方向と横方向のローカル速度の比を使用して、スリップ角を求めます。 このブロックはステアリング角度を使用して、タイヤの力を車両固定座標系に変換します。 [車軸の力] を |
抗力
| 計算 | 説明 |
|---|---|
| 座標変換 | このブロックは、風速を慣性座標系から車両固定座標系に変換します。 |
| 抗力 | このブロックは対気速度を求めるために、CG の車両速度から風速を減算します。このブロックは、対気速度を使用して抗力を求めます。 |
| 抗力モーメント | このブロックは、対気速度を使用して抗力モーメントを求めます。 |
横方向のコーナリング剛性と緩和のダイナミクス
| 説明 | 実装 |
|---|---|
定数 | このブロックは剛性値 Cyf と Cyr に定数を使用します。 |
Mapped slip angle | このブロックは、コーナリング剛性データとスリップ角の関数のルックアップ テーブルを使用します。 |
Mapped vertical load | このブロックは、コーナリング剛性データと垂直負荷の関数のルックアップ テーブルを使用します。 |
緩和長ダイナミクスを含む | スリップ角には、緩和長ダイナミクスの設定が含まれます。緩和長は、車輪の円周方向移動の関数である有効なコーナリング剛性の力を近似します。 |
式では次の変数を使用します。
| 車両固定の "x" 軸に沿った車両 CG の変位、速度、および加速度 | |
| 車両固定の "y" 軸に沿った車両 CG の変位、速度、および加速度 | |
ψ | 地球固定の "Z" 軸を中心とする車両固定座標系の回転 (ヨー) |
r, | 車両固定の "z" 軸を中心とする車両の角速度 (ヨー レート) |
| Fxf, Fxr | 車両固定の "x" 軸に沿って、前輪と後輪にかかる縦方向の力 |
| Fyf, Fyr | 車両固定の "y" 軸に沿って、前輪と後輪にかかる横方向の力 |
| Fxext, Fyext, Fzext | 車両固定の "x"、"y"、"z" の各軸に沿って、車両 CG にかかる外力 |
| Fdx, Fdy, Fdz | 車両固定の "x"、"y"、"z" の各軸に沿って、車両 CG にかかる抗力 |
| Fxinput, Fyinput, Fzinput | 車両固定の "x"、"y"、"z" の各軸に沿って、車両 CG にかかる入力の力 |
| Mxext, Myext, Mzext | 車両固定の "x"、"y"、"z" の各軸を中心とする、車両 CG の外部モーメント |
| Mdx, Mdy, Mdz | 車両固定の "x"、"y"、"z" の各軸を中心とする、車両 CG の抗力モーメント |
| Mxinput, Myinput, Mzinput | 車両固定の "x"、"y"、"z" の各軸を中心とする、車両 CG の入力モーメント |
| Izz | 車両固定の "z" 軸を中心とする車体の慣性モーメント |
| Fxft, Fxrt | 車両固定の "x" 軸に沿って、前輪と後輪にかかる縦方向のタイヤの力 |
| Fyft, Fyft | 車両固定の "y" 軸に沿って、前輪と後輪にかかる横方向のタイヤの力 |
| Fxfl, Fxfr | 車両固定の "x" 軸に沿って、左前輪と右前輪にかかる縦方向の力 |
| Fyfl, Fyfr | 車両固定の "y" 軸に沿って、左前輪と右前輪にかかる横方向の力 |
| Fxrl, Fxrr | 車両固定の "x" 軸に沿って、左後輪と右後輪にかかる縦方向の力 |
| Fyrl, Fyrr | 車両固定の "y" 軸に沿って、左後輪と右後輪にかかる横方向の力 |
| Fxflt, Fxfrt | 車両固定の "x" 軸に沿って、左前輪と右前輪にかかる縦方向のタイヤの力 |
| Fyflt, Fyfrt | 車両固定の "y" 軸に沿って、左前輪と右前輪にかかる横方向のタイヤの力 |
| Fxrlt, Fxrrt | 車両固定の "x" 軸に沿って、左後輪と右後輪にかかる縦方向のタイヤの力 |
| Fyrlt, Fyrrt | 車両固定の "y" 軸に沿って、左後輪と右後輪にかかる横方向の力 |
| Fzf,Fzr | 車両固定の "z" 軸に沿って、前車軸と後車軸にかかる垂直抗力 |
| Fznom | 車両固定の "z" 軸に沿って、車軸にかかる定格垂直抗力 |
| Fzfl,Fzfr | 車両固定の "z" 軸に沿って、左前輪と右前輪にかかる垂直抗力 |
| Fzrl,Fzrr | 車両固定の "z" 軸に沿って、左後輪と右後輪にかかる垂直抗力 |
| m | 車体の質量 |
| a, b | 共通の車軸平面に車両 CG を垂直投影した点から前輪と後輪までの各距離 |
| h | 車軸平面から上の車両 CG の高さ |
| d | 車両固定の "y" 軸に沿った、幾何学的中心線から重心までの横方向の距離 |
| hh | 車両固定の "z" 軸に沿って、車軸平面から上のヒッチの高さ |
| dh | 共通の車軸平面にトラクター CG を垂直投影した点からヒッチまでの縦方向の距離 |
| hl | 車両固定の "y" 軸に沿った、重心からヒッチまでの横方向の距離 |
| αf, αr | 前輪と後輪のスリップ角 |
| αfl, αfr | 左前輪と右前輪のスリップ角 |
| αrl, αrr | 左後輪と右後輪のスリップ角 |
| δf, δr | 前輪と後輪のステアリング角度 |
| δrl, δrr | 左後輪と右後輪のステアリング角度 |
| δfl, δfr | 左前輪と右前輪のステアリング角度 |
| wf, wr | フロント トラックとリア トラックの幅 |
| Cyf, Cyr | 前輪と後輪のコーナリング剛性 |
| Cyfdata, Cyrdata | 前輪と後輪のコーナリング剛性データ |
| σf, σr | 前輪と後輪の緩和長 |
| αfσ, αrσ | 前輪と後輪のスリップ角 (緩和長を含む) |
| vwf, vwr | 前輪と後輪のハードポイントの速度の大きさ |
| μf, μr | 前輪と後輪の摩擦係数 |
| μfl, μfr | 左前輪と右前輪の摩擦係数 |
| μrl, μrr | 左後輪と右後輪の摩擦係数 |
| Cd | 車両固定の "x" 軸に沿って作用する空気抵抗係数 |
| Cs | 車両固定の "y" 軸に沿って作用する空気抵抗係数 |
| Cl | 車両固定の "z" 軸に沿って作用する空気抵抗係数 |
| Crm | 車両固定の "x" 軸を中心として作用する空気抵抗のロール モーメント |
| Cpm | 車両固定の "y" 軸を中心として作用する空気抵抗のピッチ モーメント |
| Cym | 車両固定の "z" 軸を中心として作用する空気抵抗のヨー モーメント |
| Af | 前面投影面積 |
| R | 大気の比気体定数 |
| T | 環境の気温 |
| Pabs | 環境の絶対圧力 |
| wx, wy, wz | 車両固定の "x"、"y"、"z" の各軸に沿った風速 |
| Wx, Wy, Wz | 慣性座標系の "X"、"Y"、"Z" の各軸に沿った風速 |
例

3 車軸トレーラーを牽引する 3 車軸トラクター
商用トラック向けの 3 車軸トレーラーを牽引する 3 車軸トラクターをシミュレート。ヒッチ サブシステム、正弦波ステアリング テストまたはブレーキ テスト、およびトラクターの後輪に加わる車軸トルクを実装。

2 車軸トレーラーを牽引する 2 車軸トラクター
商用トラック向けの 2 車軸トレーラーを牽引する 2 車軸トラクターをシミュレート。モデルでヒッチ サブシステム、正弦波ステアリング入力、およびトラクターの後輪に加わる車軸トルクを実装します。
端子
入力
出力
パラメーター
オプション
Vehicle Dynamics Blockset ライブラリには、縦方向運動、横方向運動、ヨー運動をモデル化する 2 つのタイプの Vehicle Body 3DOF ブロックがあります。
| ブロック | [車両 Track] の設定 | 実装 |
|---|---|---|
Vehicle Body 3DOF Single Track |
|
|
Vehicle Body 3DOF Dual Track |
| 車両の四隅または "ハードポイント" に力が作用します。 |
プログラムでの使用
ブロック パラメーターの値をプログラムによって設定するには、set_param 関数を使用します。
ブロック パラメーターの値をプログラムによって取得するには、get_param 関数を使用します。
| パラメーター: | trackMode |
| 値: | Single (bicycle) (既定値) | Dual |
| データ型: | character vector |
[車軸の力] パラメーターを使用して力のタイプを指定します。
| [車軸の力] の設定 | 実装 |
|---|---|
|
|
|
|
|
|
プログラムでの使用
ブロック パラメーターの値をプログラムによって設定するには、set_param 関数を使用します。
ブロック パラメーターの値をプログラムによって取得するには、get_param 関数を使用します。
| パラメーター: | inputMode |
| 値: | External longitudinal velocity (既定値) | External longitudinal forces | External forces |
| データ型: | character vector |
入力信号
縦方向
車両固定の "x" 軸に沿った車両 CG の初期速度 (m/s 単位)。
依存関係
Vehicle Body 3DOF Single Track ブロックまたは Vehicle Body 3DOF Dual Track ブロックでこのパラメーターを有効にするには、[車軸の力] を次のいずれかのオプションに設定します。
縦方向の外力外力
プログラムでの使用
ブロック パラメーターの値をプログラムによって設定するには、set_param 関数を使用します。
ブロック パラメーターの値をプログラムによって取得するには、get_param 関数を使用します。
| パラメーター: | xdot_o |
| 値: | 0 (既定値) | scalar |
| データ型: | double |
横方向
フロント タイヤのコーナリング剛性、Cyf (N/rad 単位)。
依存関係
Vehicle Body 3DOF Single Track ブロックまたは Vehicle Body 3DOF Dual Track ブロックでこのパラメーターを有効にするには、次を行います。
[車軸の力] を次のいずれかのオプションに設定します。
縦方向の外部速度縦方向の外力
[マッピングされたコーナリング剛性] を
[定数]に設定します。
プログラムでの使用
ブロック パラメーターの値をプログラムによって設定するには、set_param 関数を使用します。
ブロック パラメーターの値をプログラムによって取得するには、get_param 関数を使用します。
| パラメーター: | Cy_f |
| 値: | 12e3 (既定値) | scalar |
| データ型: | double |
リア タイヤのコーナリング剛性、Cyr (N/rad 単位)。
依存関係
Vehicle Body 3DOF Single Track ブロックまたは Vehicle Body 3DOF Dual Track ブロックでこのパラメーターを有効にするには、次を行います。
[車軸の力] を次のいずれかのオプションに設定します。
縦方向の外部速度縦方向の外力
[マッピングされたコーナリング剛性] を
[定数]に設定します。
プログラムでの使用
ブロック パラメーターの値をプログラムによって設定するには、set_param 関数を使用します。
ブロック パラメーターの値をプログラムによって取得するには、get_param 関数を使用します。
| パラメーター: | Cy_r |
| 値: | 11e3 (既定値) | scalar |
| データ型: | double |
マッピングされたコーナリング剛性の計算を有効にします。
依存関係
パラメーターを有効にするには、[車軸の力] を次のいずれかのオプションに設定します。
縦方向の外部速度縦方向の外力
プログラムでの使用
ブロック パラメーターの値をプログラムによって設定するには、set_param 関数を使用します。
ブロック パラメーターの値をプログラムによって取得するには、get_param 関数を使用します。
| パラメーター: | CalphaMode |
| 値: | constant (既定値) | Mapped slip angle | Mapped vertical load |
| データ型: | character vector |
車両固定の "y" 軸に沿った、幾何学的中心線から重心までの横方向の距離 d (m 単位)。正の値は、車両 CM が幾何学的中心線の右にあることを示します。負の値は、車両 CM が幾何学的中心線の左にあることを示します。
依存関係
このパラメーターを有効にするには、[車両 Track] を [デュアル (四輪)] に設定します。
プログラムでの使用
ブロック パラメーターの値をプログラムによって設定するには、set_param 関数を使用します。
ブロック パラメーターの値をプログラムによって取得するには、get_param 関数を使用します。
| パラメーター: | d |
| 値: | 0 (既定値) | scalar |
| データ型: | double |
車両固定の "y" 軸に沿った、幾何学的中心線からヒッチまでの横方向の距離、hl (m 単位)。正の値は、ヒッチが幾何学的中心線の右にあることを示します。負の値は、ヒッチが幾何学的中心線の左にあることを示します。
依存関係
このパラメーターを有効にするには、[入力信号] ペインで [ヒッチ力] または [ヒッチ モーメント] を選択します。
プログラムでの使用
ブロック パラメーターの値をプログラムによって設定するには、set_param 関数を使用します。
ブロック パラメーターの値をプログラムによって取得するには、get_param 関数を使用します。
| パラメーター: | hl |
| 値: | 0 (既定値) | scalar |
| データ型: | double |
前車軸スリップ角ブレークポイント、αfbrk (rad 単位)。
依存関係
このパラメーターを有効にするには、次のようにします。
[車軸の力] を次のいずれかのオプションに設定します。
縦方向の外部速度縦方向の外力
[マッピングされたコーナリング剛性] を
[Mapped slip angle]に設定します。
プログラムでの使用
ブロック パラメーターの値をプログラムによって設定するには、set_param 関数を使用します。
ブロック パラメーターの値をプログラムによって取得するには、get_param 関数を使用します。
| パラメーター: | alpha_f_brk |
| 値: | 1-by-N vector |
| データ型: | double |
前車軸の垂直負荷ブレークポイント、Fzfbrk (N 単位)。
依存関係
このパラメーターを有効にするには、次のようにします。
[車軸の力] を次のいずれかのオプションに設定します。
縦方向の外部速度縦方向の外力
[マッピングされたコーナリング剛性] を
[Mapped vertical load]に設定します。
プログラムでの使用
ブロック パラメーターの値をプログラムによって設定するには、set_param 関数を使用します。
ブロック パラメーターの値をプログラムによって取得するには、get_param 関数を使用します。
| パラメーター: | Fz_f_brk |
| 値: | 1-by-N vector |
| データ型: | double |
前車軸のコーナリング剛性データ、Cyfdata (N/rad 単位)。
依存関係
このパラメーターを有効にするには、次のようにします。
[車軸の力] を次のいずれかのオプションに設定します。
縦方向の外部速度縦方向の外力
[マッピングされたコーナリング剛性] を次のいずれかのオプションに設定します。
Mapped slip angleMapped vertical load
プログラムでの使用
ブロック パラメーターの値をプログラムによって設定するには、set_param 関数を使用します。
ブロック パラメーターの値をプログラムによって取得するには、get_param 関数を使用します。
| パラメーター: | Cy_f_data |
| 値: | 1-by-N vector |
| データ型: | double |
後車軸スリップ角ブレークポイント、αrbrk (rad 単位)。
依存関係
このパラメーターを有効にするには、次のようにします。
[車軸の力] を次のいずれかのオプションに設定します。
縦方向の外部速度縦方向の外力
[マッピングされたコーナリング剛性] を
[Mapped slip angle]に設定します。
プログラムでの使用
ブロック パラメーターの値をプログラムによって設定するには、set_param 関数を使用します。
ブロック パラメーターの値をプログラムによって取得するには、get_param 関数を使用します。
| パラメーター: | alpha_r_brk |
| 値: | 1-by-N vector |
| データ型: | double |
後車軸の垂直負荷ブレークポイント、Fzrbrk (N 単位)。
依存関係
このパラメーターを有効にするには、次のようにします。
[車軸の力] を次のいずれかのオプションに設定します。
縦方向の外部速度縦方向の外力
[マッピングされたコーナリング剛性] を
[Mapped vertical load]に設定します。
プログラムでの使用
ブロック パラメーターの値をプログラムによって設定するには、set_param 関数を使用します。
ブロック パラメーターの値をプログラムによって取得するには、get_param 関数を使用します。
| パラメーター: | Fz_r_brk |
| 値: | 1-by-N vector |
| データ型: | double |
後車軸のコーナリング剛性データ、Cyrdata (N/rad 単位)。
依存関係
このパラメーターを有効にするには、次のようにします。
[車軸の力] を次のいずれかのオプションに設定します。
縦方向の外部速度縦方向の外力
[マッピングされたコーナリング剛性] を次のいずれかのオプションに設定します。
Mapped slip angleMapped vertical load
プログラムでの使用
ブロック パラメーターの値をプログラムによって設定するには、set_param 関数を使用します。
ブロック パラメーターの値をプログラムによって取得するには、get_param 関数を使用します。
| パラメーター: | Cy_r_data |
| 値: | 1-by-N vector |
| データ型: | double |
定格垂直抗力 (N 単位)。
依存関係
このパラメーターを有効にするには、次のようにします。
[車軸の力] を次のいずれかのオプションに設定します。
縦方向の外部速度縦方向の外力
[マッピングされたコーナリング剛性] を次のいずれかのオプションに設定します。
定数Mapped slip angle
プログラムでの使用
ブロック パラメーターの値をプログラムによって設定するには、set_param 関数を使用します。
ブロック パラメーターの値をプログラムによって取得するには、get_param 関数を使用します。
| パラメーター: | Fznom |
| 値: | 5000 (既定値) | scalar |
| データ型: | double |
ヨー
空力
環境
シミュレーション
車体の前後軸に沿った、CG からの車両シャシーの幾何学的な前後方向のオフセット (m 単位)。3D 可視化エンジンを使用する場合、このオフセットを使用して車両の CG に対するシャシー位置を設定し、CG に対するメッシュ原点との整合性を確保します。任意に定義した位置での位置および速度情報の報告にも使用できます。
プログラムでの使用
ブロック パラメーターの値をプログラムによって設定するには、set_param 関数を使用します。
ブロック パラメーターの値をプログラムによって取得するには、get_param 関数を使用します。
| パラメーター: | longOff |
| 値: | 0 (既定値) | scalar |
| データ型: | double |
車体の左右軸に沿った、CG からの車両シャシーの幾何学的に左右方向のオフセット (m 単位)。3D 可視化エンジンを使用する場合、このオフセットを使用して車両の CG に対するシャシー位置を設定し、CG に対するメッシュ原点との整合性を確保します。任意に定義した位置での位置および速度情報の報告にも使用できます。
プログラムでの使用
ブロック パラメーターの値をプログラムによって設定するには、set_param 関数を使用します。
ブロック パラメーターの値をプログラムによって取得するには、get_param 関数を使用します。
| パラメーター: | latOff |
| 値: | 0 (既定値) | scalar |
| データ型: | double |
車体の上下軸に沿った、CG からの車両シャシーの幾何学的に上下方向のオフセット (m 単位)。3D 可視化エンジンを使用する場合、このオフセットを使用して車両の CG に対するシャシー位置を設定し、CG に対するメッシュ原点との整合性を確保します。任意に定義した位置での位置および速度情報の報告にも使用できます。
プログラムでの使用
ブロック パラメーターの値をプログラムによって設定するには、set_param 関数を使用します。
ブロック パラメーターの値をプログラムによって取得するには、get_param 関数を使用します。
| パラメーター: | vertOff |
| 値: | 0.35 (既定値) | scalar |
| データ型: | double |
参照
[1] Gillespie, Thomas. Fundamentals of Vehicle Dynamics. Warrendale, PA: Society of Automotive Engineers (SAE), 1992.