loss
説明
loss は、カーネル回帰 (incrementalRegressionKernel オブジェクト) またはバイナリ カーネル分類 (incrementalClassificationKernel オブジェクト) 用に構成されたインクリメンタル学習モデルの回帰損失または分類損失を返します。
データ ストリームでのモデルの性能を測定し、結果を出力モデルに保存するには、updateMetrics または updateMetricsAndFit を呼び出します。
例
ストリーミング データでのインクリメンタル モデルの性能を 3 通りの方法で測定します。
累積メトリクスで、インクリメンタル学習の開始以降の性能を測定します。
ウィンドウ メトリクスで、指定した観測値ウィンドウでの性能を測定します。指定したウィンドウをモデルが処理するたびにメトリクスが更新されます。
関数
lossで、指定したデータのバッチについてのみ性能を測定します。
人の行動のデータ セットを読み込みます。データをランダムにシャッフルします。
load humanactivity n = numel(actid); rng(1) % For reproducibility idx = randsample(n,n); X = feat(idx,:); Y = actid(idx);
データ セットの詳細については、コマンド ラインで Description を入力してください。
応答は、次の 5 つのクラスのいずれかになります。座る、立つ、歩く、走る、または踊る。被験者が移動しているかどうか (actid > 2) を基準に、応答を二分します。
Y = Y > 2;
バイナリ分類用のインクリメンタル カーネル モデルを作成します。メトリクス ウィンドウ サイズを観測値 1000 個に指定します。モデルを最初の 10 個の観測値に当てはめて loss 用に構成します。
p = size(X,2); Mdl = incrementalClassificationKernel(MetricsWindowSize=1000); initobs = 10; Mdl = fit(Mdl,X(1:initobs,:),Y(1:initobs));
Mdl は incrementalClassificationKernel モデルです。そのプロパティはすべて読み取り専用です。
データ ストリームのシミュレーションを実行し、50 個の観測値の入力チャンクごとに次のアクションを実行します。
updateMetricsを呼び出して、累積性能および観測値ウィンドウ内での性能を測定します。前のインクリメンタル モデルを新しいモデルで上書きして、パフォーマンス メトリクスを追跡します。lossを呼び出して、入力チャンクでのモデルの性能を測定します。fitを呼び出して、モデルを入力チャンクに当てはめます。前のインクリメンタル モデルを、入力観測値に当てはめた新しいモデルで上書きします。すべてのパフォーマンス メトリクスを保存して、インクリメンタル学習中にそれらがどのように進化するかを確認します。
% Preallocation numObsPerChunk = 50; nchunk = floor((n - initobs)/numObsPerChunk); ce = array2table(zeros(nchunk,3),VariableNames=["Cumulative","Window","Loss"]); % Incremental learning for j = 1:nchunk ibegin = min(n,numObsPerChunk*(j-1) + 1 + initobs); iend = min(n,numObsPerChunk*j + initobs); idx = ibegin:iend; Mdl = updateMetrics(Mdl,X(idx,:),Y(idx)); ce{j,["Cumulative","Window"]} = Mdl.Metrics{"ClassificationError",:}; ce{j,"Loss"} = loss(Mdl,X(idx,:),Y(idx)); Mdl = fit(Mdl,X(idx,:),Y(idx)); end
Mdl は、ストリーム内のすべてのデータで学習させた incrementalClassificationKernel モデル オブジェクトです。インクリメンタル学習中およびモデルがウォームアップされた後、updateMetrics は入力観測値でのモデルの性能をチェックし、関数 fit はモデルをその観測値に当てはめます。loss はメトリクスのウォームアップ期間に依存しないため、すべての反復について分類誤差を測定します。
パフォーマンス メトリクスが学習中にどのように進化するかを確認するには、それらをプロットします。
plot(ce.Variables) xlim([0 nchunk]) ylabel("Classification Error") xline(Mdl.MetricsWarmupPeriod/numObsPerChunk,"--") legend(ce.Properties.VariableNames) xlabel("Iteration")
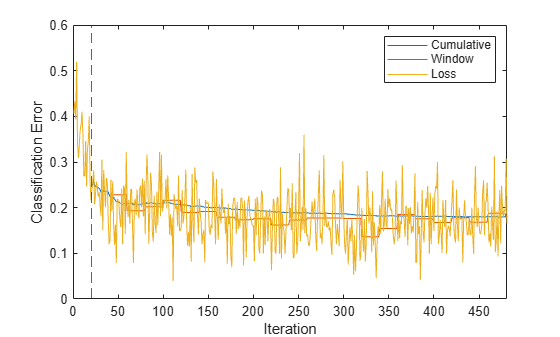
黄色の線は、入力データの各チャンクの分類誤差を表します。メトリクスのウォームアップ期間後、Mdl は累積およびウィンドウ メトリクスを追跡します。累積およびバッチ損失は、関数 fit が入力データにインクリメンタル モデルを当てはめるにつれて収束します。
ストリーミング データに回帰用のインクリメンタル学習モデルを当てはめ、入力データのバッチの平均絶対偏差 (MAD) を計算します。
ロボット アームのデータ セットを読み込みます。標本サイズ n と予測子変数の数 p を取得します。
load robotarm
n = numel(ytrain);
p = size(Xtrain,2);データ セットの詳細については、コマンド ラインで Description を入力してください。
回帰用のインクリメンタル カーネル モデルを作成します。次のようにモデルを構成します。
メトリクスのウォームアップ期間を観測値 1000 個に指定します。
メトリクス ウィンドウ サイズを観測値 500 個に指定します。
平均絶対偏差 (MAD) を追跡して、モデルの性能を測定します。新しい各観測値の絶対誤差を測定する無名関数を作成します。名前
MeanAbsoluteErrorとそれに対応する関数を含む構造体配列を作成します。モデルを最初の 10 個の観測値に当てはめて応答予測用に構成します。
maefcn = @(z,zfit,w)(abs(z - zfit));
maemetric = struct(MeanAbsoluteError=maefcn);
Mdl = incrementalRegressionKernel(MetricsWarmupPeriod=1000,MetricsWindowSize=500, ...
Metrics=maemetric);
initobs = 10;
Mdl = fit(Mdl,Xtrain(1:initobs,:),ytrain(1:initobs));Mdl はインクリメンタル学習用に構成された incrementalRegressionKernel モデル オブジェクトです。
インクリメンタル学習を実行します。各反復で次を行います。
50 個の観測値のチャンクを処理して、データ ストリームのシミュレーションを実行します。
updateMetricsを呼び出して、データの入力チャンクの累積メトリクスとウィンドウ メトリクスを計算します。前のインクリメンタル モデルを、前のメトリクスを上書きするように当てはめた新しいモデルで上書きします。lossを呼び出して、データの入力チャンクの MAD を計算します。累積メトリクスおよびウィンドウ メトリクスでは、カスタム損失が各観測値の損失を返す必要がありますが、lossではチャンク全体での損失が必要です。絶対偏差の平均を計算します。fitを呼び出して、データの入力チャンクにインクリメンタル モデルを当てはめます。累積、ウィンドウ、およびチャンクのメトリクスを保存して、インクリメンタル学習中にそれらがどのように進化するかを確認します。
% Preallocation numObsPerChunk = 50; nchunk = floor((n - initobs)/numObsPerChunk); mae = array2table(zeros(nchunk,3),VariableNames=["Cumulative","Window","Chunk"]); % Incremental fitting for j = 1:nchunk ibegin = min(n,numObsPerChunk*(j-1) + 1 + initobs); iend = min(n,numObsPerChunk*j + initobs); idx = ibegin:iend; Mdl = updateMetrics(Mdl,Xtrain(idx,:),ytrain(idx)); mae{j,1:2} = Mdl.Metrics{"MeanAbsoluteError",:}; mae{j,3} = loss(Mdl,Xtrain(idx,:),ytrain(idx),LossFun=@(x,y,w)mean(maefcn(x,y,w))); Mdl = fit(Mdl,Xtrain(idx,:),ytrain(idx)); end
Mdl は、ストリーム内のすべてのデータで学習させた incrementalRegressionKernel モデル オブジェクトです。インクリメンタル学習中およびモデルがウォームアップされた後、updateMetrics は入力観測値でのモデルの性能をチェックし、関数 fit はモデルをその観測値に当てはめます。
パフォーマンス メトリクスをプロットして、インクリメンタル学習中にそれらがどのように進化したかを確認します。
plot(mae.Variables) ylabel("Mean Absolute Deviation") xlabel("Iteration") xlim([0 nchunk]) xline(Mdl.EstimationPeriod/numObsPerChunk,"-.") xline((Mdl.EstimationPeriod + Mdl.MetricsWarmupPeriod)/numObsPerChunk,"--") legend(mae.Properties.VariableNames)
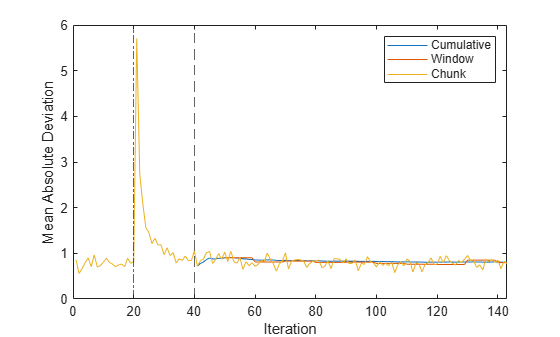
プロットは次のことを示しています。
updateMetricsは、パフォーマンス メトリクスをメトリクスのウォームアップ期間後にのみ計算します。updateMetricsは、累積メトリクスを各反復中に計算します。updateMetricsは、ウィンドウ メトリクスを 500 個の観測値 (10 回の反復) の処理後に計算します。Mdlが観測値の予測のためにインクリメンタル学習の初めから構成されたため、lossはデータの入力チャンクごとに MAD を計算できます。
入力引数
名前と値の引数
出力引数
詳細
"分類損失" 関数は分類モデルの予測誤差を評価します。複数のモデルで同じタイプの損失を比較した場合、損失が低い方が予測モデルとして優れていることになります。
以下のシナリオを考えます。
L は加重平均分類損失です。
n は標本サイズです。
yj は観測されたクラス ラベルです。陰性クラスを示す -1 または陽性クラスを示す 1 (あるいは、
ClassNamesプロパティの最初のクラスを示す -1 または 2 番目のクラスを示す 1) を使用して符号化されます。f(Xj) は予測子データ X の観測値 (行) j に対する陽性クラスの分類スコアです。
mj = yjf(Xj) は、yj に対応するクラスに観測値 j を分類する分類スコアです。正の値の mj は正しい分類を示しており、平均損失に対する寄与は大きくありません。負の値の mj は正しくない分類を示しており、平均損失に大きく寄与します。
観測値 j の重みは wj です。
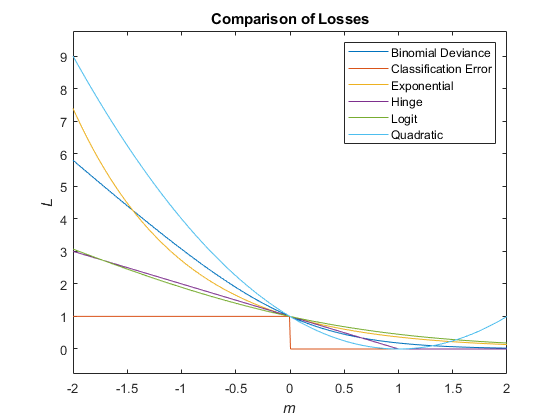
この状況では、名前と値の引数 LossFun を使用して指定できる、サポートされる損失関数は次の表のようになります。
| 損失関数 | LossFun の値 | 式 |
|---|---|---|
| 二項分布からの逸脱度 | "binodeviance" | |
| 指数損失 | "exponential" | |
| 10 進数の誤分類率 | "classiferror" | ここで、 はスコアが最大であるクラスに対応するクラス ラベル、I{·} はインジケーター関数です。 |
| ヒンジ損失 | "hinge" | |
| ロジスティック損失 | "logit" | |
| 二次損失 | "quadratic" |
関数 loss で加重平均損失を計算する際、スコアが NaN の観測値は省略されません。そのため、予測子データ X に欠損値があり、名前と値の引数 LossFun が "classiferror" として指定されていない場合に、loss で NaN が返されることがあります。ほとんどの場合、データ セットに予測子の欠損がなければ、関数 loss で NaN が返されることはありません。
次の図では、1 つの観測値のスコア m に対する損失関数を比較しています。いくつかの関数は、点 (0,1) を通過するように正規化されています。