Simulink へのパイプラインの実装
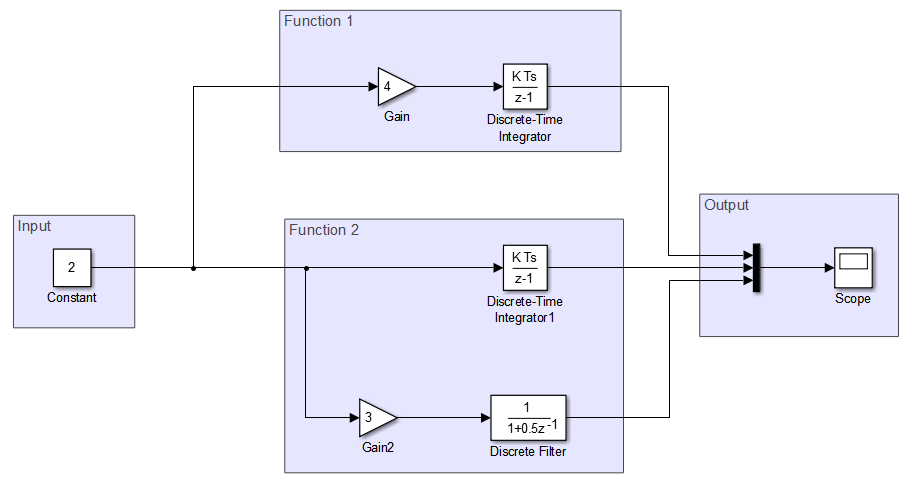
次の例は、Simulink® モデルで表されたシステムにパイプラインを実装する方法を示しています。ex_task_parallelism_initial モデルは、入力、同じ入力に適用された機能コンポーネント、連結された出力で構成されます。この例では、タスク間のデータ依存関係を取り除いて、タスクを完全に並列実行できるようにする方法を示します。パイプラインの詳細については、パラレル化のタイプを参照してください。
このモデルを同時実行用に設定します。完成したモデルを見るには、ex_pipelining_top を開きます。
同時実行用のモデルの構成
ex_task_parallelism_initialモデルを開きます。このモデル内の領域を参照モデルに変換します。同じ参照モデルを使用して、入力を処理する各機能コンポーネントを置き換えます。
モデル コンフィギュレーション パラメーターの設定
[タスクの構成] をクリックします。[同時実行] ダイアログ ボックスの右側のペインで、[同時実行用に明示的なモデル分割を有効にする] チェック ボックスをオンにします。明示的な分割を使用することにより、モデルを手動で分割できます。
[モデル化] タブで、[モデル設定] をクリックします。
[ソルバー] を選択し、[タイプ] を
Fixed-stepに設定し、[適用] をクリックします。[ソルバー] ペインで、[ソルバーの詳細] を展開します。[周期的なサンプル時間の制約] が
Unconstrainedに設定されていることを確認します。[タスクとサンプル時間オプション] で、[ターゲット上でタスクの同時実行を許可] を選択します。[コード生成]、[インターフェイス]、[詳細設定パラメーター] を選択します。[MAT ファイルのログ] チェック ボックスをオフにします。
明示的な分割を使用したモデルの分割
最上位モデルを分割します。
[同時実行] ツリーの [タスクとマッピング] で [CPU] を選択します。[タスクの追加] を 3 回クリックし、新しいタスクを 3 つ追加します。
タスクへのブロックのマッピング
[同時実行] ツリーで [タスクとマッピング] を選択します。[タスクにブロックをマッピング] ペインで次を行います。
[ブロック: Input] で
select taskをクリックし、Periodic: Taskを選択します。[ブロック: Function 1] で
Periodic: Task1を選択します。[ブロック: Function 2] で
Periodic: Task2を選択します。[ブロック: Output] で
Periodic: Taskを選択します。
このアクションにより、作成したタスクに分割がマッピングされます。Input および Output モデル ブロックは 1 つのタスク上にあります。各機能コンポーネントは個々のタスクに割り当てられます。
モデルの確定
[同時実行] ダイアログ ボックスを閉じます。
参照モデルへのコンフィギュレーションの共有
コンフィギュレーション パラメーターをすべての参照モデルに適用します。
コンフィギュレーション セットを保存するデータ ディクショナリの初期化
ディクショナリのエントリであるコンフィギュレーション セットを表す
Simulink.data.dictionary.Entryオブジェクトを作成します。この例では、ディクショナリの名前がmyData.slddで、Simulink.ConfigSetオブジェクトの名前がmyConfigsであると仮定します。ターゲット
Simulink.ConfigSetオブジェクトのコピーを一時変数に保存します。ディクショナリに対して行った変更を保存します。
コンフィギュレーション参照の設定
モデルのアクティブなコンフィギュレーション セットをコピーして、ベース ワークスペース内に独立型のコンフィギュレーション セットを作成します。
最上位モデルと各参照モデル用に別個のコンフィギュレーション参照を作成します。参照を独立型のコンフィギュレーション セットに向けるには、
SourceNameプロパティをコンフィギュレーションを表す変数freeConfigSetに設定します。ConfigSetRefオブジェクトを使用して、コンフィギュレーション参照を各モデルに付加します。モデルでコンフィギュレーション参照を使用するには、各モデルでそれをアクティブにします。
詳細については、コンフィギュレーションの複数のモデル間での共有、スクリプトを使用したモデル コンフィギュレーションの自動化およびディクショナリ内に保存されているコンフィギュレーション セットの変更を参照してください。
モデルを更新し、個別のモデル ブロックにマッピングされたタスクを確認します。
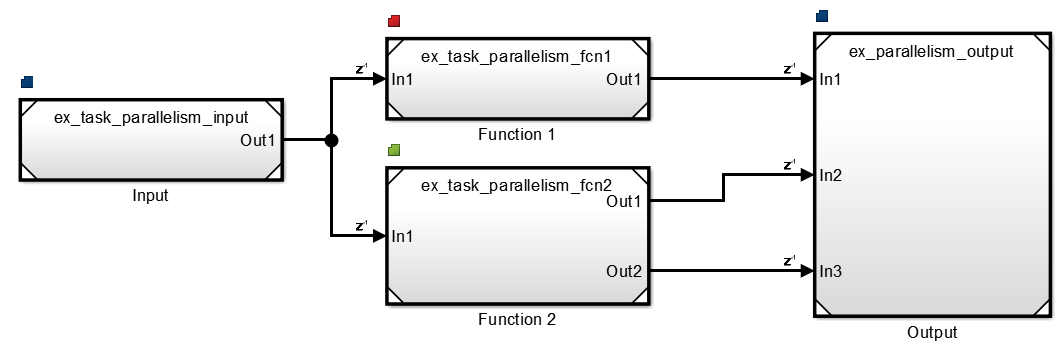
z-1 バッジで示される遅延が異なるタスク間で発生していることに注目してください。これらの遅延が発生すると、Simulink で異なるモデル出力が生じる可能性があります。並列化されたモデルのシミュレーション時に、モデルで期待した出力が得られることを確認してください。