edr
実信号での編集距離
構文
説明
[___] = edr(___, は、前述の構文の任意の入力引数に加えて使用する距離計量を指定します。metric)metric は、'euclidean'、'absolute'、'squared'、または 'symmkl' のいずれかになります。
例
チャープと正弦波の 2 つの実信号を生成します。それぞれの信号に明らかに値が外れているセクションを追加します。
x = cos(2*pi*(3*(1:1000)/1000).^2); y = cos(2*pi*9*(1:399)/400); x(400:410) = 7; y(100:115) = 7;
信号間の編集距離が最小となるように信号を歪めます。許容誤差には 0.1 を指定します。整列された信号をワーピングの前と後の両方についてプロットし、その間の距離を出力します。
tol = 0.1; edr(x,y,tol)
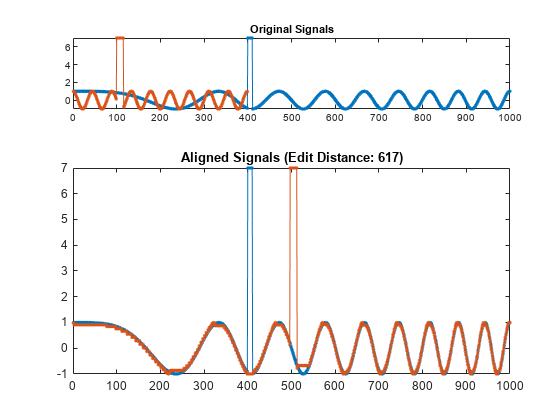
ans = 617
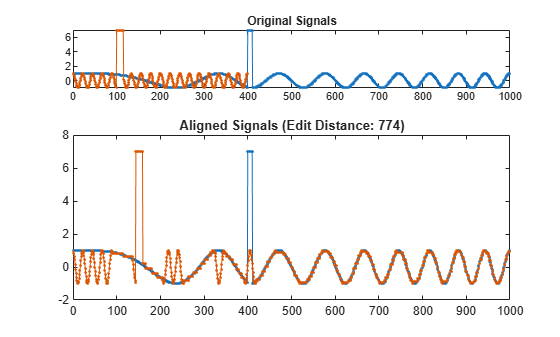
正弦波周波数を初期値の 2 倍に変更します。計算を繰り返します。
y = cos(2*pi*18*(1:399)/400); y(100:115) = 7; edr(x,y,tol);
各信号に虚数部を追加します。初期の正弦波周波数に戻します。ユークリッド距離の二乗和を最小化することによって信号を整列します。
x = exp(2i*pi*(3*(1:1000)/1000).^2);
y = exp(2i*pi*9*(1:399)/400);
x(400:405) = 5+3j;
x(405:410) = 7;
y(100:107) = 3j;
y(108:115) = 7-3j;
edr(x,y,tol,'squared');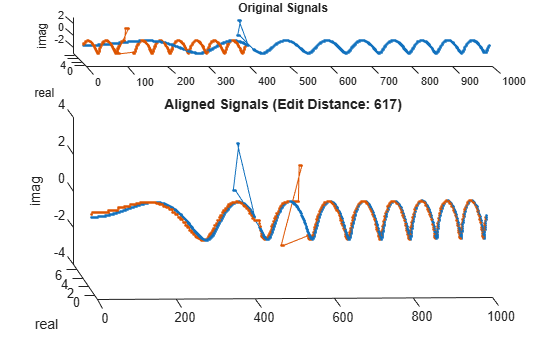
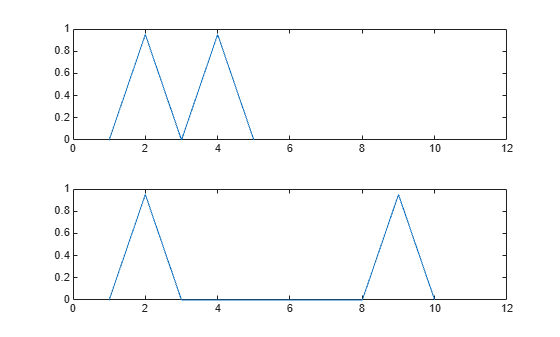
異なる長さの谷で隔てられた 2 つの明確なピークから構成される信号を 2 つ生成します。信号をプロットします。
x1 = [0 1 0 1 0]*.95; x2 = [0 1 0 0 0 0 0 0 1 0]*.95; subplot(2,1,1) plot(x1) xlim([0 12]) subplot(2,1,2) plot(x2) xlim([0 12])
信号間の編集距離を計算します。等しいサンプルどうしのみが一致するように許容誤差に小さな値を設定します。
tol = 0.1; figure edr(x1,x2,tol);
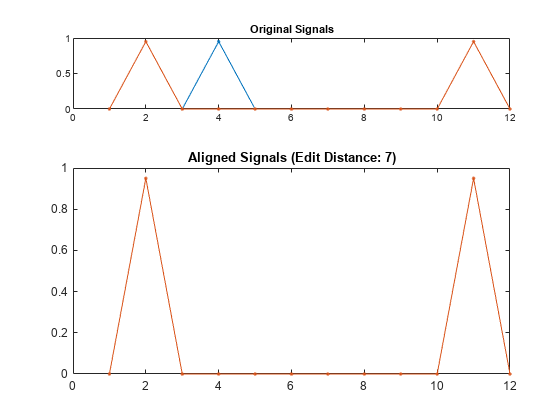
信号間の距離は 7 です。これらを揃えるには、x2 の中央にある 7 つのゼロを削除するか、x1 に 7 つのゼロを追加する必要があります。
D 行列を計算します。右の一番下の要素は、編集距離に対応します。D の定義については、実信号での編集距離を参照してください。
cnd = (abs(x1'-x2))>tol; D = zeros(length(x1)+1,length(x2)+1); D(1,2:end) = 1:length(x2); D(2:end,1) = 1:length(x1); for h = 2:length(x1)+1 for k = 2:length(x2)+1 D(h,k) = min([D(h-1,k)+1 ... D(h,k-1)+1 ... D(h-1,k-1)+cnd(h-1,k-1)]); end end D
D = 6×11
0 1 2 3 4 5 6 7 8 9 10
1 0 1 2 3 4 5 6 7 8 9
2 1 0 1 2 3 4 5 6 7 8
3 2 1 0 1 2 3 4 5 6 7
4 3 2 1 1 2 3 4 5 5 6
5 4 3 2 1 1 2 3 4 5 5
信号を揃えるワーピング パスを計算および表示します。
[d,i1,i2] = edr(x1,x2,tol); E = zeros(length(x1),length(x2)); for k = 1:length(i1) E(i1(k),i2(k)) = NaN; end E
E = 5×10
NaN 0 0 0 0 0 0 0 0 0
0 NaN 0 0 0 0 0 0 0 0
0 0 NaN NaN NaN NaN NaN NaN 0 0
0 0 0 0 0 0 0 0 NaN 0
0 0 0 0 0 0 0 0 0 NaN
計算を繰り返しますが、今度は、対角線から逸脱する要素が 2 つまでになるようにワーピング パスに制約を付けます。引き伸ばした信号とワーピング パスをプロットします。2 番目のプロットで、x 軸に沿って実行する行列の列を設定します。
[dc,i1c,i2c] = edr(x1,x2,tol,2); subplot(2,1,1) plot([x1(i1c);x2(i2c)]','.-') title(['Distance: ' num2str(dc)]) subplot(2,1,2) plot(i2c,i1c,'o-',[i2(1) i2(end)],[i1(1) i1(end)]) axis ij title('Warping Path')
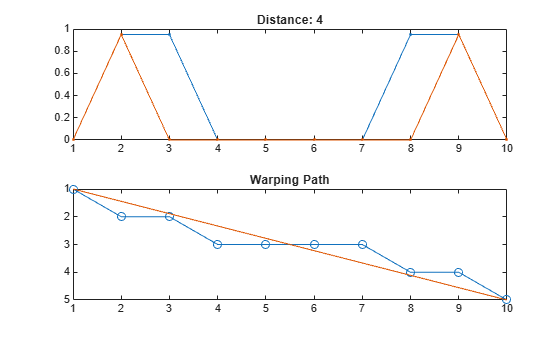
この制約により、編集距離は小さくなりますが、信号が歪みます。制約を満たすことができない場合、edr は、距離に対して NaN を返します。対角線からの逸脱が最大でも 1 要素になるようにワーピング パスが強制されていることがわかります。
[dc,i1c,i2c] = edr(x1,x2,tol,1); subplot(2,1,1) plot([x1(i1c);x2(i2c)]','.-') title(['Distance: ' num2str(dc)]) subplot(2,1,2) plot(i2c,i1c,'o-',[i2(1) i2(end)],[i1(1) i1(end)]) axis ij title('Warping Path')

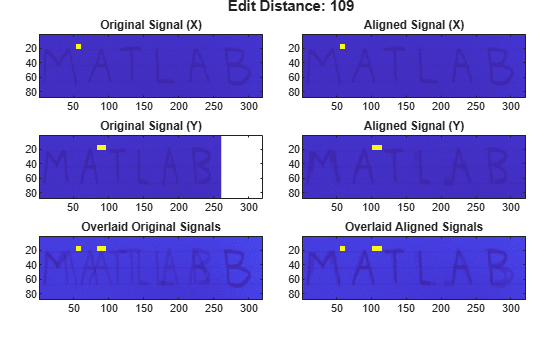
ファイル MATLAB1.gif と MATLAB2.gif には、"MATLAB®" という単語の 2 つの手書き文字のサンプルが含まれています。ファイルを読み込みます。データに汚れを付けて外れ値を追加します。
samp1 = 'MATLAB1.gif'; samp2 = 'MATLAB2.gif'; x = double(imread(samp1)); y = double(imread(samp2)); x(15:20,54:60) = 4000; y(15:20,84:96) = 4000;
編集距離を使用して x 軸に沿って手書きサンプルの位置を合わせます。許容誤差には 450 を指定します。
edr(x,y,450);
入力引数
出力引数
詳細
参照
[1] Chen, Lei, M. Tamer Özsu, and Vincent Oria. "Robust and Fast Similarity Search for Moving Object Trajectories." Proceedings of 24th ACM International Conference on Management of Data (SIGMOD ‘05). 2005, pp. 491–502.
[2] Paliwal, K. K., Anant Agarwal, and Sarvajit S. Sinha. "A Modification over Sakoe and Chiba’s Dynamic Time Warping Algorithm for Isolated Word Recognition." Signal Processing. Vol. 4, 1982, pp. 329–333.
[3] Sakoe, Hiroaki, and Seibi Chiba. "Dynamic Programming Algorithm Optimization for Spoken Word Recognition." IEEE® Transactions on Acoustics, Speech, and Signal Processing. Vol. ASSP-26, No. 1, 1978, pp. 43–49.
拡張機能
バージョン履歴
R2016b で導入
参考
alignsignals | dtw | finddelay | findsignal | xcorr