dtw
動的タイム ワーピングを使用した信号間の距離
説明
例
チャープと正弦波の 2 つの実信号を生成します。
x = cos(2*pi*(3*(1:1000)/1000).^2); y = cos(2*pi*9*(1:399)/400);
動的タイム ワーピングを使用して、点の間のユークリッド距離の和が最小となるように信号を整列させます。整列後の信号と距離を表示します。
dtw(x,y);

正弦波周波数を初期値の 2 倍に変更します。計算を繰り返します。
y = cos(2*pi*18*(1:399)/400); dtw(x,y);

各信号に虚数部を追加します。初期の正弦波周波数に戻します。動的タイム ワーピングを使用し、ユークリッド距離の二乗和を最小化することによって信号を整列させます。
x = exp(2i*pi*(3*(1:1000)/1000).^2);
y = exp(2i*pi*9*(1:399)/400);
dtw(x,y,'squared');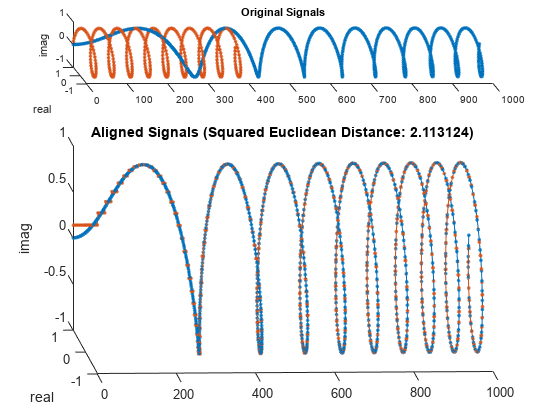
初期のコンピューターの出力に似た書体を考案します。それを使用して MATLAB® という単語を書きます。
chr = @(x)dec2bin(x')-48; M = chr([34 34 54 42 34 34 34]); A = chr([08 20 34 34 62 34 34]); T = chr([62 08 08 08 08 08 08]); L = chr([32 32 32 32 32 32 62]); B = chr([60 34 34 60 34 34 60]); MATLAB = [M A T L A B];
ランダムな文字の列を繰り返し、間隔を変えて単語を壊します。元の単語と 3 つの壊れたバージョンを表示します。再現可能な結果が必要な場合は、乱数発生器をリセットします。
rng('default') c = @(x)x(:,sort([1:6 randi(6,1,3)])); subplot(4,1,1,'XLim',[0 60]) spy(MATLAB) xlabel('') ylabel('Original') for kj = 2:4 subplot(4,1,kj,'XLim',[0 60]) spy([c(M) c(A) c(T) c(L) c(A) c(B)]) xlabel('') ylabel('Corrupted') end

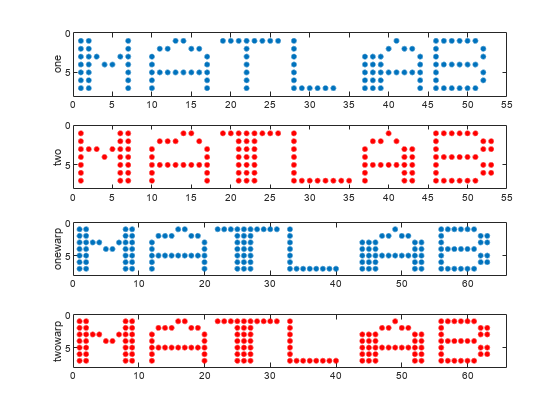
壊れたバージョンの単語をさらに 2 つ生成します。動的タイム ワーピングを使用してこの 2 つを位置合わせします。
one = [c(M) c(A) c(T) c(L) c(A) c(B)]; two = [c(M) c(A) c(T) c(L) c(A) c(B)]; [ds,ix,iy] = dtw(one,two); onewarp = one(:,ix); twowarp = two(:,iy);
位置合わせしていない単語と位置合わせした単語を表示します。
figure subplot(4,1,1) spy(one) xlabel('') ylabel('one') subplot(4,1,2) spy(two,'r') xlabel('') ylabel('two') subplot(4,1,3) spy(onewarp) xlabel('') ylabel('onewarp') subplot(4,1,4) spy(twowarp,'r') xlabel('') ylabel('twowarp')
dtw の組み込み機能を使用して計算を繰り返します。
dtw(one,two);

異なる長さの谷で隔てられた 2 つの明確なピークから構成される信号を 2 つ生成します。信号をプロットします。
x1 = [0 1 0 0 0 0 0 0 0 0 0 1 0]*.95; x2 = [0 1 0 1 0]*.95; subplot(2,1,1) plot(x1) xl = xlim; subplot(2,1,2) plot(x2) xlim(xl)

ワーピング パスを制限せずに信号を整列させます。完全な整列を行うには、関数が、短い方の信号の 1 つのサンプルのみを反復する必要があります。
figure dtw(x1,x2);

2 つの信号の間のワーピング パスと直線近似をプロットします。整列を達成するため、関数によってピーク間のトラフを十分に広げます。
[d,i1,i2] = dtw(x1,x2);
figure
plot(i1,i2,'o-',[i1(1) i1(end)],[i2(1) i2(end)])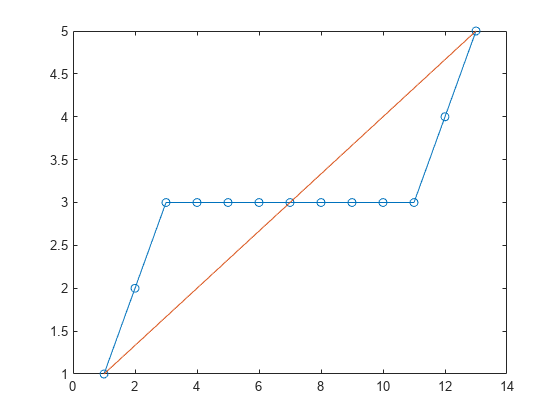
計算を繰り返しますが、今度は、ワーピング パスが最大 3 つの要素において直線近似から逸脱するように制約を付けます。引き伸ばした信号とワーピング パスをプロットします。
[dc,i1c,i2c] = dtw(x1,x2,3); subplot(2,1,1) plot([x1(i1c);x2(i2c)]','.-') title(['Distance: ' num2str(dc)]) subplot(2,1,2) plot(i1c,i2c,'o-',[i1(1) i1(end)],[i2(1) i2(end)])

制約によってワーピングがサンプルの小さなサブセットに集中しすぎることはなくなりますが、整列の質が低下します。1 サンプルの制約を付けて計算を繰り返します。
dtw(x1,x2,1);

でサンプリングされた音声信号を読み込みます。ファイルには、"MATLAB®" という単語を発声している女性の録音音声が含まれています。
load mtlb % To hear, type soundsc(mtlb,Fs)
2 つの /æ/ の音素のインスタンスに対応する 2 つのセグメントを抽出します。最初のものはおおよそ 150 ms から 250 ms の間に発生し、2 番目は 370 ms から 450 ms の間に発生します。2 つの波形をプロットします。
a1 = mtlb(round(0.15*Fs):round(0.25*Fs)); a2 = mtlb(round(0.37*Fs):round(0.45*Fs)); subplot(2,1,1) plot((0:numel(a1)-1)/Fs+0.15,a1) title('a_1') subplot(2,1,2) plot((0:numel(a2)-1)/Fs+0.37,a2) title('a_2') xlabel('Time (seconds)')

% To hear, type soundsc(a1,Fs), pause(1), soundsc(a2,Fs)信号間のユークリッド距離が最小となるように時間座標軸を歪めます。歪められた信号の共有の "持続時間" を計算してプロットします。
[d,i1,i2] = dtw(a1,a2); a1w = a1(i1); a2w = a2(i2); t = (0:numel(i1)-1)/Fs; duration = t(end)
duration = 0.1297
subplot(2,1,1) plot(t,a1w) title('a_1, Warped') subplot(2,1,2) plot(t,a2w) title('a_2, Warped') xlabel('Time (seconds)')

% To hear, type soundsc(a1w,Fs), pause(1), sound(a2w,Fs)単語全体で実験を繰り返します。女性と男性が発声する「strong」という単語が含まれているファイルを読み込みます。この信号は 8 kHz でサンプリングされています。
load('strong.mat') % To hear, type soundsc(her,fs), pause(2), soundsc(him,fs)
信号間の絶対距離が最小となるように時間座標軸を歪めます。元の信号と変換後の信号をプロットします。それらの歪められた共有 "持続時間" を計算します。
dtw(her,him,'absolute'); legend('her','him')

[d,iher,ihim] = dtw(her,him,'absolute');
duration = numel(iher)/fsduration = 0.8394
% To hear, type soundsc(her(iher),fs), pause(2), soundsc(him(ihim),fs)ファイル MATLAB1.gif と MATLAB2.gif には、"MATLAB®" という単語の 2 つの手書き文字のサンプルが含まれています。ファイルを読み込み、動的タイム ワーピングを使用して x 軸に沿ってそれらを配置します。
samp1 = 'MATLAB1.gif'; samp2 = 'MATLAB2.gif'; x = double(imread(samp1)); y = double(imread(samp2)); dtw(x,y);

入力引数
出力引数
詳細
参照
[1] Paliwal, K. K., Anant Agarwal, and Sarvajit S. Sinha. "A Modification over Sakoe and Chiba’s Dynamic Time Warping Algorithm for Isolated Word Recognition." Signal Processing. Vol. 4, 1982, pp. 329–333.
[2] Sakoe, Hiroaki, and Seibi Chiba. "Dynamic Programming Algorithm Optimization for Spoken Word Recognition." IEEE® Transactions on Acoustics, Speech, and Signal Processing. Vol. ASSP-26, No. 1, 1978, pp. 43–49.
拡張機能
バージョン履歴
R2016a で導入
参考
alignsignals | edr | finddelay | findsignal | xcorr