ROS 2 パッケージからのカスタム メッセージの作成
カスタム メッセージを使用して、ROS 2 で現在サポートされているメッセージ タイプのセットを拡張します。カスタム メッセージはユーザー定義のメッセージです。サポートされているメッセージ タイプを送受信する場合は、カスタム メッセージを使用する必要はありません。サポートされているメッセージ タイプのリストを表示するには、MATLAB® コマンド ウィンドウで「ros2 msg list」と入力します。サポートされている ROS 2 メッセージの詳細については、基本的な ROS 2 メッセージの操作を参照してください。
ROS 2 カスタム メッセージをはじめて取り扱う場合は、ROS Toolbox システム要件を参照してください。
ROS 2 カスタム メッセージは、msg という名前のフォルダーを含む ROS 2 パッケージ フォルダー内に指定されます。msg フォルダーには、すべてのカスタム メッセージ タイプ定義が含まれています。たとえば、custom フォルダーにある example_b_msgs パッケージのフォルダーとファイルの構造は次のとおりです。
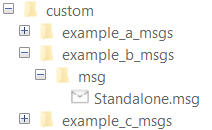
このパッケージにはカスタム メッセージ タイプ Standalone.msg が含まれています。MATLAB はこれらのファイルを使用して、パッケージに含まれるカスタム メッセージを使用するために必要なファイルを生成します。
この例では、MATLAB で ROS 2 カスタム メッセージを作成します。必要な msg ファイルが含まれる ROS 2 パッケージがなければなりません。
カスタム メッセージ パッケージが正しいことを確認したら、親フォルダーへのパスを指定し、指定したパスで ros2genmsg を呼び出します。次の例では、依存関係にある example_package_a、example_package_b、および example_package_c という 3 つのメッセージが指定されています。また、この例は、複数のメッセージが含まれるフォルダーを使用して、すべてのメッセージを同時に生成できることも示しています。
新しい MATLAB セッションを開き、カスタム メッセージ フォルダーをローカル フォルダーに作成します。
folderPath = fullfile(pwd,"custom"); copyfile("example_*_msgs",folderPath);
カスタム メッセージ ファイルのフォルダー パスを指定し、ros2genmsg を使用してカスタム メッセージを作成します。
ros2genmsg(folderPath)
Identifying message files in folder 'C:/Work/custom'.Done. Removing previous version of Python virtual environment.Done. Creating a Python virtual environment.Done. Adding required Python packages to virtual environment.Done. Copying include folders.Done. Copying libraries.Done. Validating message files in folder 'C:/Work/custom'.Done. [3/3] Generating MATLAB interfaces for custom message packages... Done. Running colcon build in folder 'C:/Work/custom/matlab_msg_gen/win64'. Build in progress. This may take several minutes... Build succeeded.build log
ros2 msg list を呼び出して、新しいカスタム メッセージの作成を確認します。
ros2 msg list
action_msgs/CancelGoalRequest action_msgs/GoalInfo action_msgs/GoalStatusArray actionlib_msgs/GoalID actionlib_msgs/GoalStatus builtin_interfaces/Duration builtin_interfaces/Time composition_interfaces/ListNodesRequest composition_interfaces/ListNodesResponse diagnostic_msgs/AddDiagnosticsRequest diagnostic_msgs/AddDiagnosticsResponse example_a_msgs/DependsOnB example_b_msgs/Standalone example_interfaces/AddTwoIntsRequest example_interfaces/AddTwoIntsResponse example_interfaces/Bool example_interfaces/Byte...
これで、上で作成したカスタム メッセージを標準メッセージとして使用できます。メッセージ送受信の詳細については、ROS 2 のパブリッシャーとサブスクライバーとのデータ交換を参照してください。
example_b_msgs/Standalone メッセージを使用するパブリッシャーを作成します。
node = ros2node("/node_1"); pub = ros2publisher(node,"/example_topic","example_b_msgs/Standalone");
同じトピックでサブスクライバーを作成します。
sub = ros2subscriber(node,"/example_topic");メッセージを作成し、そのメッセージを送信します。
custom_msg = ros2message("example_b_msgs/Standalone"); custom_msg.int_property = uint32(12); custom_msg.string_property='This is ROS 2 custom message example'; send(pub,custom_msg); pause(3) % Allow a few seconds for the message to arrive
LatestMessage フィールドを使用すると、サブスクライバーが最近受信したメッセージがわかります。
sub.LatestMessage
ans = struct with fields:
MessageType: 'example_b_msgs/Standalone'
int_property: 12
string_property: 'This is ROS 2 custom message example'
作成した ROS オブジェクトを削除します。
clear node pub sub
組み込みメッセージ定義のカスタム定義との置き換え
MATLAB は、多くの組み込み ROS 2 メッセージ タイプを提供しています。これらのメッセージ タイプの定義を、上記で詳述した同じカスタム メッセージ作成ワークフローを使用して、新しい定義と置き換えることができます。組み込みのメッセージ パッケージの定義を置き換える場合は、カスタム メッセージ パッケージ フォルダーに、対応する組み込みメッセージ パッケージのすべてのメッセージ タイプに対する新しい定義 (.msg ファイル) が含まれていることを確認する必要があります。
参考
ros2genmsg | msgList | ros2publisher | ros2subscriber | ros2node