ROS Toolbox システム要件
ROS または ROS 2 用のカスタム メッセージを生成したり、MATLAB® または Simulink® ソフトウェアから ROS または ROS 2 ノードを展開したりするには、ROS または ROS 2 パッケージを作成する必要があります。これらのパッケージを作成するには、ご使用のプラットフォーム用の Python® ソフトウェア、CMake ソフトウェア、および C++ コンパイラが必要です。関数 rosinit を使用して ROS および ROS 2 ネットワークに接続するには、必要なバージョンの Python をインストールして設定する必要があります。
MATLAB または Simulink から ROS または ROS 2 ノードを生成して展開するには、MATLAB Coder™ または Simulink Coder のライセンスもそれぞれ必要です。CUDA® 用に最適化された ROS または ROS 2 を生成して展開するには、GPU Coder™ のライセンスが必要です。
メモ
MATLAB ソフトウェアと Simulink ソフトウェアのノードは、メッセージ定義が同じ場合にのみ、推奨される ROS および ROS 2 ディストリビューションに含まれていない ROS または ROS 2 ディストリビューション内の ROS または ROS 2 ノードと引き続き通信できます。
推奨される ROS および ROS 2 ディストリビューション
推奨される ROS および ROS 2 ディストリビューションのリリースごとのサポート
| MATLAB のリリース | ROS ディストリビューション | ROS 2 ディストリビューション |
|---|---|---|
| R2025a ~ R2026a | Noetic Ninjemys | Jazzy Jalisco |
| R2023b ~ R2024b | Noetic Ninjemys | Humble Hawksbill |
| R2022a ~ R2023a | Noetic Ninjemys | Foxy Fitzroy |
| R2020b ~ R2021b | Melodic Morenia | Dashing Diademata |
| R2019b ~ R2020a | Indigo Igloo | Bouncy Bolson |
| R2016 ~ R2019a | Indigo Igloo | サポートなし |
サードパーティ製ソフトウェア
メモ
R2022b 以降、CMake の手動インストールは不要です。
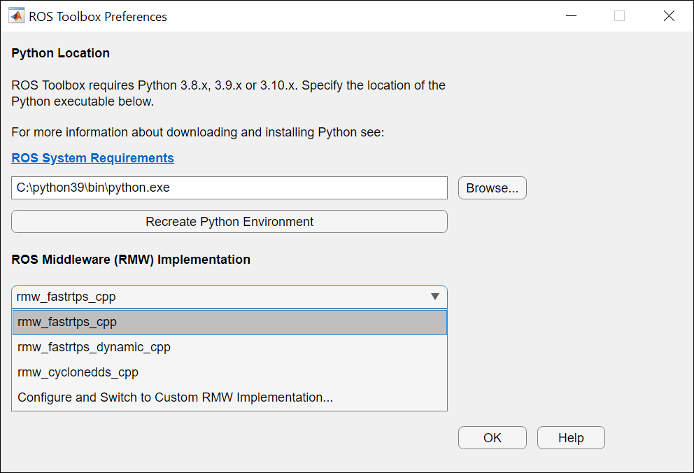
Python 環境の構成
Python 環境を構成するためのリリースごとの情報
| MATLAB のリリース | Python 環境の構成 |
|---|---|
| R2022b 以降 | |
| R2022b より前 |
ヒント
ROS 通信に組み込みのセキュリティはありません。これは、望ましくないユーザーによる未認証のアクセス、盗聴、データのなりすましなどのリスクにさらされる可能性があることを意味します。また、後から追加するノードにより、以前に送信されたデータにアクセスされることもあります。これらのリスクを軽減するには、ROS 通信を有線またはワイヤレスの信頼できるネットワークに限定し、利用できる最も強力な認証方法を使用するなど、信頼性の高いネットワーク セキュリティ対策を実装します。さらに、ベンダーから提供されている場合はセキュア バージョンの通信フレームワークをダウンロードして使用し、最新のセキュリティ ベスト プラクティスと一致するように構成します。
Docker およびバーチャル マシンのインストールと設定
ROS Toolbox に付属のバーチャル マシン イメージをインストールして設定します。これは Ubuntu Linux をベースとしており、ROS Toolbox の ROS の例をサポートするように事前構成されています。ROS Toolbox に付属の Docker イメージを使用します。これも Ubuntu Linux をベースとしており、ROS Toolbox の ROS と ROS 2 の例をサポートするように構成されています。