ros2genmsg
ROS 2 定義からのカスタム メッセージの生成
説明
ros2genmsg( は、指定されたフォルダー パス内の ROS 2 のカスタム メッセージ、カスタム サービス、カスタム アクション、および ROS 2 IDL 定義を読み取ることにより、ROS 2 カスタム メッセージを生成します。ROS 2 は、OMG IDL 4.2 仕様の一部をサポートしています。この関数のフォルダーには、1 つ以上の ROS 2 パッケージが含まれている必要があります。これらのパッケージでは、メッセージ定義が folderpath).msg ファイルに、サービス定義が .srv ファイルに、アクション定義が .action ファイルに含まれています。カスタム メッセージ、カスタム サービス、およびカスタム アクションの各定義は、.idl ファイルから直接生成することもできます。これらのファイルは、それぞれ /msg、/srv、および /action フォルダーの下に配置しなければなりません。
ROS インターフェイス タイプと IDL タイプの間のマッピングの詳細については、Mapping between ROS interface types and DDS IDL types を参照してください。
生成したカスタム メッセージは、サポートされている他のすべてのメッセージと同様に、MATLAB® で送受信できます。これらのメッセージは ros2message を使用して作成するか、MATLAB コマンド ウィンドウで ros2 msg list と入力してメッセージのリストを表示することもできます。
メモ
ROS 2 用のカスタム メッセージを生成するには、ROS 2 パッケージを作成しなければなりません。このプロセスには、ご使用のプラットフォームに対応した C++ コンパイラが必要です。詳細については、ROS Toolbox システム要件を参照してください。
ROS 2 定義からのカスタム メッセージは、MATLAB の新しいリリースごとに再生成する必要があります。
MATLAB で生成したカスタム メッセージで eProsima Fast DDS ミドルウェアおよび Eclipse Cyclone DDS ミドルウェアがサポートされるようになりました。ROS ミドルウェア実装の詳細については、Switching Between ROS Middleware Implementationsを参照してください。
ros2genmsg( は、1 つ以上の名前と値の引数を使用して追加のオプションを指定します。folderpath,Name=Value)
例
カスタム メッセージを使用して、ROS 2 で現在サポートされているメッセージ タイプのセットを拡張します。カスタム メッセージはユーザー定義のメッセージです。サポートされているメッセージ タイプを送受信する場合は、カスタム メッセージを使用する必要はありません。サポートされているメッセージ タイプのリストを表示するには、MATLAB® コマンド ウィンドウで「ros2 msg list」と入力します。サポートされている ROS 2 メッセージの詳細については、基本的な ROS 2 メッセージの操作を参照してください。
ROS 2 カスタム メッセージをはじめて取り扱う場合は、ROS Toolbox システム要件を参照してください。
ROS 2 カスタム メッセージは、msg という名前のフォルダーを含む ROS 2 パッケージ フォルダー内に指定されます。msg フォルダーには、すべてのカスタム メッセージ タイプ定義が含まれています。たとえば、custom フォルダーにある example_b_msgs パッケージのフォルダーとファイルの構造は次のとおりです。
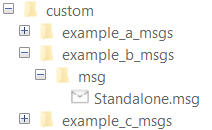
このパッケージにはカスタム メッセージ タイプ Standalone.msg が含まれています。MATLAB はこれらのファイルを使用して、パッケージに含まれるカスタム メッセージを使用するために必要なファイルを生成します。
この例では、MATLAB で ROS 2 カスタム メッセージを作成します。必要な msg ファイルが含まれる ROS 2 パッケージがなければなりません。
カスタム メッセージ パッケージが正しいことを確認したら、親フォルダーへのパスを指定し、指定したパスで ros2genmsg を呼び出します。次の例では、依存関係にある example_package_a、example_package_b、および example_package_c という 3 つのメッセージが指定されています。また、この例は、複数のメッセージが含まれるフォルダーを使用して、すべてのメッセージを同時に生成できることも示しています。
新しい MATLAB セッションを開き、カスタム メッセージ フォルダーをローカル フォルダーに作成します。
folderPath = fullfile(pwd,"custom"); copyfile("example_*_msgs",folderPath);
カスタム メッセージ ファイルのフォルダー パスを指定し、ros2genmsg を使用してカスタム メッセージを作成します。
ros2genmsg(folderPath)
Identifying message files in folder 'C:/Work/custom'.Done. Removing previous version of Python virtual environment.Done. Creating a Python virtual environment.Done. Adding required Python packages to virtual environment.Done. Copying include folders.Done. Copying libraries.Done. Validating message files in folder 'C:/Work/custom'.Done. [3/3] Generating MATLAB interfaces for custom message packages... Done. Running colcon build in folder 'C:/Work/custom/matlab_msg_gen/win64'. Build in progress. This may take several minutes... Build succeeded.build log
ros2 msg list を呼び出して、新しいカスタム メッセージの作成を確認します。
ros2 msg list
action_msgs/CancelGoalRequest action_msgs/GoalInfo action_msgs/GoalStatusArray actionlib_msgs/GoalID actionlib_msgs/GoalStatus builtin_interfaces/Duration builtin_interfaces/Time composition_interfaces/ListNodesRequest composition_interfaces/ListNodesResponse diagnostic_msgs/AddDiagnosticsRequest diagnostic_msgs/AddDiagnosticsResponse example_a_msgs/DependsOnB example_b_msgs/Standalone example_interfaces/AddTwoIntsRequest example_interfaces/AddTwoIntsResponse example_interfaces/Bool example_interfaces/Byte...
これで、上で作成したカスタム メッセージを標準メッセージとして使用できます。メッセージ送受信の詳細については、ROS 2 のパブリッシャーとサブスクライバーとのデータ交換を参照してください。
example_b_msgs/Standalone メッセージを使用するパブリッシャーを作成します。
node = ros2node("/node_1"); pub = ros2publisher(node,"/example_topic","example_b_msgs/Standalone");
同じトピックでサブスクライバーを作成します。
sub = ros2subscriber(node,"/example_topic");メッセージを作成し、そのメッセージを送信します。
custom_msg = ros2message("example_b_msgs/Standalone"); custom_msg.int_property = uint32(12); custom_msg.string_property='This is ROS 2 custom message example'; send(pub,custom_msg); pause(3) % Allow a few seconds for the message to arrive
LatestMessage フィールドを使用すると、サブスクライバーが最近受信したメッセージがわかります。
sub.LatestMessage
ans = struct with fields:
MessageType: 'example_b_msgs/Standalone'
int_property: 12
string_property: 'This is ROS 2 custom message example'
作成した ROS オブジェクトを削除します。
clear node pub sub
組み込みメッセージ定義のカスタム定義との置き換え
MATLAB は、多くの組み込み ROS 2 メッセージ タイプを提供しています。これらのメッセージ タイプの定義を、上記で詳述した同じカスタム メッセージ作成ワークフローを使用して、新しい定義と置き換えることができます。組み込みのメッセージ パッケージの定義を置き換える場合は、カスタム メッセージ パッケージ フォルダーに、対応する組み込みメッセージ パッケージのすべてのメッセージ タイプに対する新しい定義 (.msg ファイル) が含まれていることを確認する必要があります。
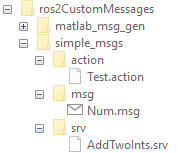
この例では、MATLAB® で共有可能な ROS 2 カスタム メッセージ パッケージを作成します。必要な msg ファイルが含まれる ROS 2 パッケージがなければなりません。この図では、適切なフォルダー構造の例を示します。
カスタム メッセージ パッケージ フォルダーを準備したら、親フォルダーへのパスを指定し、指定したパスで ros2genmsg を呼び出します。
Windows® マシンでカスタム メッセージを生成する場合、フォルダー パスが Windows の MAX_PATH 制限を超えるとビルドが失敗する可能性があります。ビルドの失敗を回避するには、次のオプションのいずれかを選択します。
より短いフォルダー パスを使用するか、長いパスを短いネットワーク ドライブにマッピングする。
名前と値の引数
BuildRootを使用して、次のように短い代替ビルド パスを指定する。
ros2genmsg(genDir, BuildRoot='C:/shortBuildPath')
この例では、パスがより短い別の場所にカスタム メッセージを生成する方法を示します。
カスタム メッセージ パッケージ フォルダーをローカル ディレクトリに作成します。
genDir = fullfile(pwd, 'ros2CustomMessages'); packagePath = fullfile(genDir, 'simple_msgs'); mkdir(packagePath)
カスタム メッセージ パッケージ フォルダー内に msg という名前のフォルダーを作成します。
mkdir(packagePath,'msg')msg フォルダー内に .msg という名前のファイルを作成します。
messageDefinition = {'int64 num'}messageDefinition = 1×1 cell array
{'int64 num'}
fileID = fopen(fullfile(packagePath,'msg', ... 'Num.msg'),'w'); fprintf(fileID,'%s\n',messageDefinition{:}); fclose(fileID);
ROS 2 IDL (.idl) ファイルから ROS 2 のカスタム メッセージ タイプ、カスタム サービス タイプ、およびカスタム アクション タイプを直接生成することもできます。
.idl ファイルから ROS 2 カスタム メッセージを作成するには、ディレクトリ内に .idl ファイル用の別のカスタム メッセージ パッケージ フォルダーを作成します。
folderPath = fullfile(pwd,"ros2CustomMessages"); packagePath = fullfile(folderPath,"simple_idl_msgs"); mkdir(packagePath)
カスタム メッセージ パッケージ フォルダー内にフォルダー msg を作成します。
mkdir(packagePath, "msg")msg フォルダー内に .idl ファイルを作成します。
idlMsgDefinition = {
'module simple_idl_msgs {'
'module msg {'
'struct SimpleMsg {'
'uint8 uint8_type;'
'string string_type;'
'};'
'};'
'};'
}idlMsgDefinition = 8×1 cell array
"'module simple_idl_msgs {'"
"'module msg {'"
"'struct SimpleMsg {'"
"'uint8 uint8_type;'"
"'string string_type;'"
"'};'"
"'};'"
"'};'"
fileID = fopen(fullfile(packagePath,'msg','SimpleMsg.idl'),'w'); fprintf(fileID,'%s\n',idlMsgDefinition{:}); fclose(fileID);
ここで、カスタム メッセージ パッケージ フォルダーのパスを simple_msgs に戻し、その中に srv という名前のフォルダーを作成します。
packagePath = fullfile(genDir, 'simple_msgs'); mkdir(packagePath,'srv')
srv フォルダー内に .srv という名前のファイルを作成します。
serviceDefinition = {'int64 a'
'int64 b'
'---'
'int64 sum'}serviceDefinition = 4×1 cell array
"'int64 a'"
"'int64 b'"
"'---'"
"'int64 sum'"
fileID = fopen(fullfile(packagePath,'srv', ... 'AddTwoInts.srv'),'w'); fprintf(fileID,'%s\n',serviceDefinition{:}); fclose(fileID);
カスタム メッセージ パッケージ フォルダー内に action という名前のフォルダーも作成します。
mkdir(packagePath,'action')action フォルダー内に .action という名前のファイルを作成します。
actionDefinition = {'int64 goal'
'---'
'int64 result'
'---'
'int64 feedback'}actionDefinition = 5×1 cell array
"'int64 goal'"
"'---'"
"'int64 result'"
"'---'"
"'int64 feedback'"
fileID = fopen(fullfile(packagePath,'action', ... 'Test.action'),'w'); fprintf(fileID,'%s\n',actionDefinition{:}); fclose(fileID);
.msg ファイル、.srv ファイル、および .action ファイル内の ROS 2 定義からカスタム メッセージを生成します。名前と値の引数 CreateShareableFile を使用して、生成したカスタム メッセージの共有可能な ZIP アーカイブを作成し、名前と値の引数 BuildRoot を使用して、短い代替ビルド パスを指定します。
この ZIP アーカイブを使用してカスタム メッセージを別のマシンに登録する方法の詳細については、ros2RegisterMessagesを参照してください。
ros2genmsg(genDir, CreateShareableFile=true, BuildRoot='C:/shortBuildPath');Creating Python virtual environment for ros2.Done. Adding required Python packages to virtual environment.Done. Copying include folders.Done. Copying libraries.Done. Done. [2/2] Generating MATLAB interfaces for custom message packages... Done. Running colcon build in folder 'C:/shortBuildPath/matlab_msg_gen_R2026a/win64'. Build in progress. This may take several minutes... Build succeeded.build_log.Generating zip file in the folder 'C:/shortBuildPath'.Done.

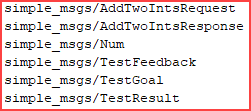
コマンド ウィンドウで「ros2 msg list」と入力して、新しいカスタム メッセージの作成を確認します。
入力引数
名前と値の引数
制限
ノードの再起動
カスタム メッセージを生成した後に、既存の ROS 2 ノードを再起動します。
カスタム メッセージを使用したコード生成
カスタム メッセージ タイプおよびカスタム サービス タイプを ROS 2 機能とともに使用して、スタンドアロン ROS 2 ノード用の C++ コードを生成できます。生成されたコード (TGZ アーカイブ) には、カスタム メッセージ定義および ROS 2 カスタム メッセージ パッケージが含まれます。生成されたコードを対象の Linux® システムでビルドすると、カスタム メッセージ パッケージが
colconワークスペースで自動的に使用可能になります。このワークスペースを現在の作業ディレクトリとして設定します。生成されたコードをビルドする前に、システムにカスタム メッセージ パッケージをインストールまたはコピーします。
MATLAB Compiler
MATLAB Compiler™ ソフトウェアでは、ROS カスタム メッセージと
ros2genmsg関数はサポートされません。
ビルド パスの長さの制限
Windows® では、ビルド パスが長いとカスタム メッセージの生成が失敗する場合があります。カスタム メッセージ フォルダーをパスがより短い場所に移動するか、名前と値の引数
BuildRootを使用して代替ビルド パスを指定します。カスタム メッセージ フォルダーが書き込みアクセス権限のないディレクトリにある場合、メッセージの生成は失敗します。フォルダーを書き込み可能なディレクトリに移動するか、
BuildRoot引数を使用して別のビルド パスを指定します。
ヒント
Microsoft® Visual Studio® のインストール中に、必ず [Desktop development with C++] ワークロードを選択してください。これにより、MSVC コンパイラと、カスタム メッセージの生成に必要なすべての依存関係がインストールされます。
カスタム メッセージ フォルダーへのパスが 260 文字を超えていないことを確認してください。
Python 環境の構成が正しいことを確認します。詳細については、ROS Toolbox システム要件を参照してください。
ROS 2 用に生成されるカスタム メッセージ ライブラリは、内部の ROS ワークフローに統合されるユーザー作成のファイルです。これらのファイルを未承認のアクセスから守り、システムの整合性を維持するには、対象とするユーザー アカウントのみにアクセスを制限するように適切なディレクトリの権限を設定します。