共有可能な ROS 2 カスタム メッセージ パッケージの作成
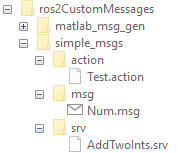
この例では、MATLAB® で共有可能な ROS 2 カスタム メッセージ パッケージを作成します。必要な msg ファイルが含まれる ROS 2 パッケージがなければなりません。この図では、適切なフォルダー構造の例を示します。
カスタム メッセージ パッケージ フォルダーを準備したら、親フォルダーへのパスを指定し、指定したパスで ros2genmsg を呼び出します。
Windows® マシンでカスタム メッセージを生成する場合、フォルダー パスが Windows の MAX_PATH 制限を超えるとビルドが失敗する可能性があります。ビルドの失敗を回避するには、次のオプションのいずれかを選択します。
より短いフォルダー パスを使用するか、長いパスを短いネットワーク ドライブにマッピングする。
名前と値の引数
BuildRootを使用して、次のように短い代替ビルド パスを指定する。
ros2genmsg(genDir, BuildRoot='C:/shortBuildPath')
この例では、パスがより短い別の場所にカスタム メッセージを生成する方法を示します。
カスタム メッセージ パッケージ フォルダーをローカル ディレクトリに作成します。
genDir = fullfile(pwd, 'ros2CustomMessages'); packagePath = fullfile(genDir, 'simple_msgs'); mkdir(packagePath)
カスタム メッセージ パッケージ フォルダー内に msg という名前のフォルダーを作成します。
mkdir(packagePath,'msg')msg フォルダー内に .msg という名前のファイルを作成します。
messageDefinition = {'int64 num'}messageDefinition = 1×1 cell array
{'int64 num'}
fileID = fopen(fullfile(packagePath,'msg', ... 'Num.msg'),'w'); fprintf(fileID,'%s\n',messageDefinition{:}); fclose(fileID);
ROS 2 IDL (.idl) ファイルから ROS 2 のカスタム メッセージ タイプ、カスタム サービス タイプ、およびカスタム アクション タイプを直接生成することもできます。
.idl ファイルから ROS 2 カスタム メッセージを作成するには、ディレクトリ内に .idl ファイル用の別のカスタム メッセージ パッケージ フォルダーを作成します。
folderPath = fullfile(pwd,"ros2CustomMessages"); packagePath = fullfile(folderPath,"simple_idl_msgs"); mkdir(packagePath)
カスタム メッセージ パッケージ フォルダー内にフォルダー msg を作成します。
mkdir(packagePath, "msg")msg フォルダー内に .idl ファイルを作成します。
idlMsgDefinition = {
'module simple_idl_msgs {'
'module msg {'
'struct SimpleMsg {'
'uint8 uint8_type;'
'string string_type;'
'};'
'};'
'};'
}idlMsgDefinition = 8×1 cell array
"'module simple_idl_msgs {'"
"'module msg {'"
"'struct SimpleMsg {'"
"'uint8 uint8_type;'"
"'string string_type;'"
"'};'"
"'};'"
"'};'"
fileID = fopen(fullfile(packagePath,'msg','SimpleMsg.idl'),'w'); fprintf(fileID,'%s\n',idlMsgDefinition{:}); fclose(fileID);
ここで、カスタム メッセージ パッケージ フォルダーのパスを simple_msgs に戻し、その中に srv という名前のフォルダーを作成します。
packagePath = fullfile(genDir, 'simple_msgs'); mkdir(packagePath,'srv')
srv フォルダー内に .srv という名前のファイルを作成します。
serviceDefinition = {'int64 a'
'int64 b'
'---'
'int64 sum'}serviceDefinition = 4×1 cell array
"'int64 a'"
"'int64 b'"
"'---'"
"'int64 sum'"
fileID = fopen(fullfile(packagePath,'srv', ... 'AddTwoInts.srv'),'w'); fprintf(fileID,'%s\n',serviceDefinition{:}); fclose(fileID);
カスタム メッセージ パッケージ フォルダー内に action という名前のフォルダーも作成します。
mkdir(packagePath,'action')action フォルダー内に .action という名前のファイルを作成します。
actionDefinition = {'int64 goal'
'---'
'int64 result'
'---'
'int64 feedback'}actionDefinition = 5×1 cell array
"'int64 goal'"
"'---'"
"'int64 result'"
"'---'"
"'int64 feedback'"
fileID = fopen(fullfile(packagePath,'action', ... 'Test.action'),'w'); fprintf(fileID,'%s\n',actionDefinition{:}); fclose(fileID);
.msg ファイル、.srv ファイル、および .action ファイル内の ROS 2 定義からカスタム メッセージを生成します。名前と値の引数 CreateShareableFile を使用して、生成したカスタム メッセージの共有可能な ZIP アーカイブを作成し、名前と値の引数 BuildRoot を使用して、短い代替ビルド パスを指定します。
この ZIP アーカイブを使用してカスタム メッセージを別のマシンに登録する方法の詳細については、ros2RegisterMessagesを参照してください。
ros2genmsg(genDir, CreateShareableFile=true, BuildRoot='C:/shortBuildPath');Creating Python virtual environment for ros2.Done. Adding required Python packages to virtual environment.Done. Copying include folders.Done. Copying libraries.Done. Done. [2/2] Generating MATLAB interfaces for custom message packages... Done. Running colcon build in folder 'C:/shortBuildPath/matlab_msg_gen_R2026a/win64'. Build in progress. This may take several minutes... Build succeeded.build_log.Generating zip file in the folder 'C:/shortBuildPath'.Done.

コマンド ウィンドウで「ros2 msg list」と入力して、新しいカスタム メッセージの作成を確認します。