ロボット マニピュレーター
ROS Toolbox では、Gazebo や Unity® などの ROS 対応シミュレーターに接続し、シミュレーション環境で Kinova® ロボット アームや Universal Robots UR シリーズ マニピュレーターなどのロボット マニピュレーター モデルを使用してアプリケーションをシミュレーションできます。
Robotics System Toolbox™ を使用してロボット マニピュレーターをモデル化し、タスク空間の理解と衝突回避のモーション プランニングを実証できます。その後、ROS Toolbox 経由でシミュレーターとの通信チャネルを確立し、エンドツーエンドのピックアンドプレース ワークフローなどのアプリケーションをシミュレーションすることや、ROS Toolbox を使用して ROS メッセージ経由で制御コマンドを送信してロボット マニピュレーターを操作すること、Gazebo または Unity でシミュレーションされた軌跡を表示することもできます。
注目の例

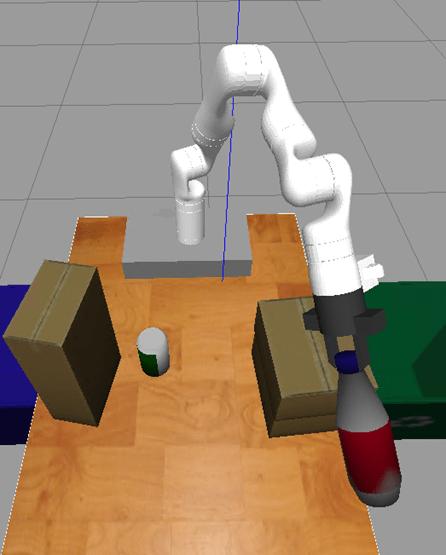
Gazebo での ROS を使用したピックアンドプレース ワークフロー
Kinova Gen3 マニピュレーター用のピックアンドプレース ワークフローを設定し、Gazebo 物理シミュレーターで ROS を使用してシミュレートする。

Unity 3D での ROS を使用したピックアンドプレース ワークフロー
Kinova Gen3 などのロボット マニピュレーター用のエンドツーエンドのピックアンドプレース ワークフローを設定し、Unity ゲーム エンジンでロボットをシミュレートする。
点群処理および RRT パス プランニングを使用した Gazebo でのピックアンドプレース ワークフロー
点群処理および RRT パス プランニングを使用して Kinova Gen3 マニピュレーター用のピックアンドプレース ワークフローを設定する。

ROS アクションと逆運動学を使用した PR2 のアーム動作の制御
ROS アクションと逆運動学を使用し、MATLAB® でコマンドを送信して PR2 ロボット アームのジョイント位置を計算する。

Design and Simulate Warehouse Pick-and-Place Application Using Mobile Manipulator in Simulink and Gazebo
Set up an end-to-end, pick-and-place workflow for a mobile manipulator using Simulink® and simulate it in Gazebo®.

Generate Automated ros_control Plugin for 3-D Shape Tracing Manipulator
Generate and deploy a 3-D shape tracing contoller as a ros_control plugin from Simulink. Perform 3-D shape tracing using UR manipulator and depth point cloud.
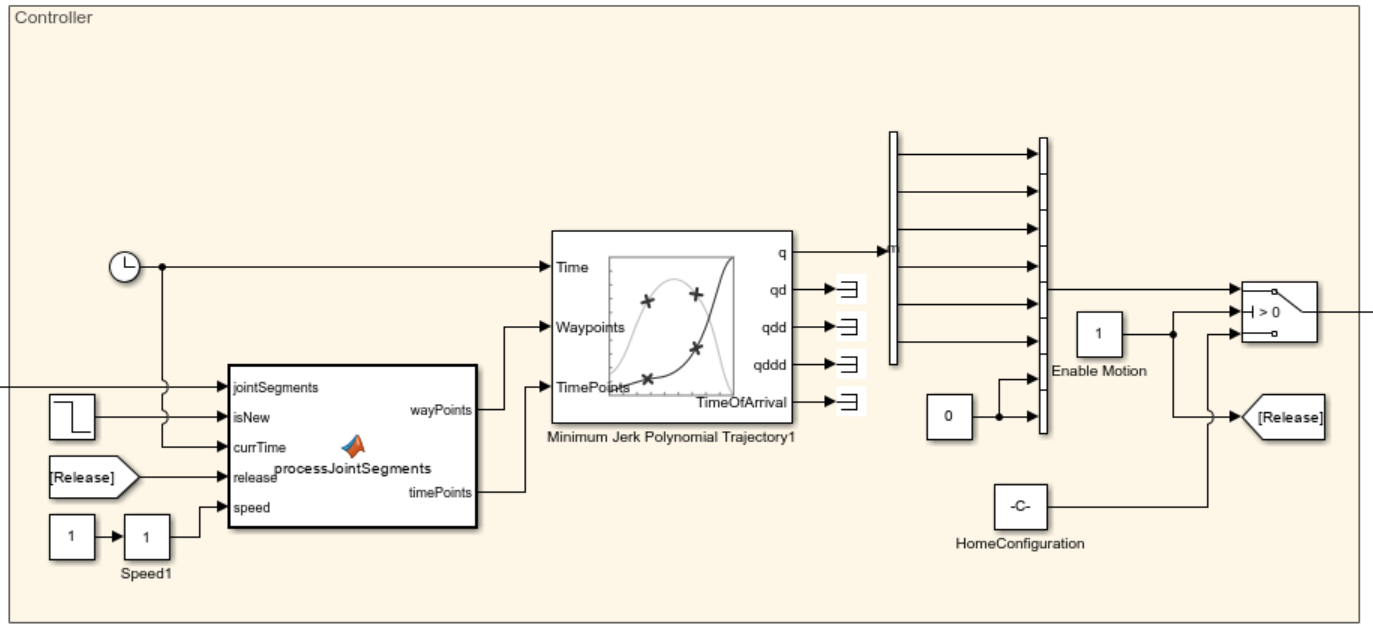
Design Trajectory Controller for UR5e Manipulator Using Simulink and Unreal Engine Co-simulation
Design a trajectory controller using Simulink® for a UR5e Manipulator. It also shows how to simulate the controller with the UR5e Manipulator robot in Unreal Engine® 3-D simulation environment.
Automated Generation and Deployment of ros2_control Plugin for Trajectory Controller
Generate a ros2_control plugin for a trajectory controller model designed in Simulink® and integrate it into an existing ROS 2 project. This example adds ROS 2 Control interfaces to the UR5e manipulator trajectory controller model designed in the previous step, Automated Generation and Deployment of ros2_control Plugin for Trajectory Controller, and generates the ros2_control plugin.

Design and Validate Object Detection and Motion Planning Algorithms Using Gazebo, OpenCV, and MATLAB
Design and validate complex application workflows for Kinova Gen3 7-DoF Ultralightweight Robot using Gazebo, OpenCV, Robotics Systems Toolbox™ and ROS Toolbox.
Control UR5 Robotic Arm Using ROS 2 Action Client in Simulink
Use ROS 2 action client in Simulink® to command a UR5 robotic arm in Gazebo by sending a joint trajectory goal to its trajectory controller.

Getting Started with Connecting and Controlling a UR5e Cobot from Universal Robots
Move UR5 cobot using joint space control, task space control, and waypoint tracking in task space and joint space in ROS.

Getting Started with Standalone ROS Node Generation for Universal Robots
Plan, create and validate a deployable motion planning standalone ROS node for UR5e robot with URSim, Gazebo or physical UR5e.

Semi-Structured Intelligent Bin Picking for UR5e Using YOLO and PCA-Based Object Detection
Detailed workflow for simulating intelligent bin picking using Universal Robots UR5e cobot hardware.