地上ロボット
ROS Toolbox では、ROS または ROS 2 ネットワークを実行しているリモート デバイス上の ROS 対応シミュレーターでシミュレーションされた地上ロボットの制御用のスタンドアロン アプリケーションをテストおよび展開できます。
地上ロボット制御アプリケーションを MATLAB® または Simulink® で作成し、検証し、C++ コード生成用に最適化して、ROS または ROS 2 ノードとしてターゲット ROS デバイスに展開できます。データをオフラインで解析したり、ROS および ROS 2 bag ファイルから再生して可視化することもできます。
注目の例

Sign Following Robot with ROS in MATLAB
Control a simulated robot running on a separate ROS-based simulator over a ROS network using MATLAB.
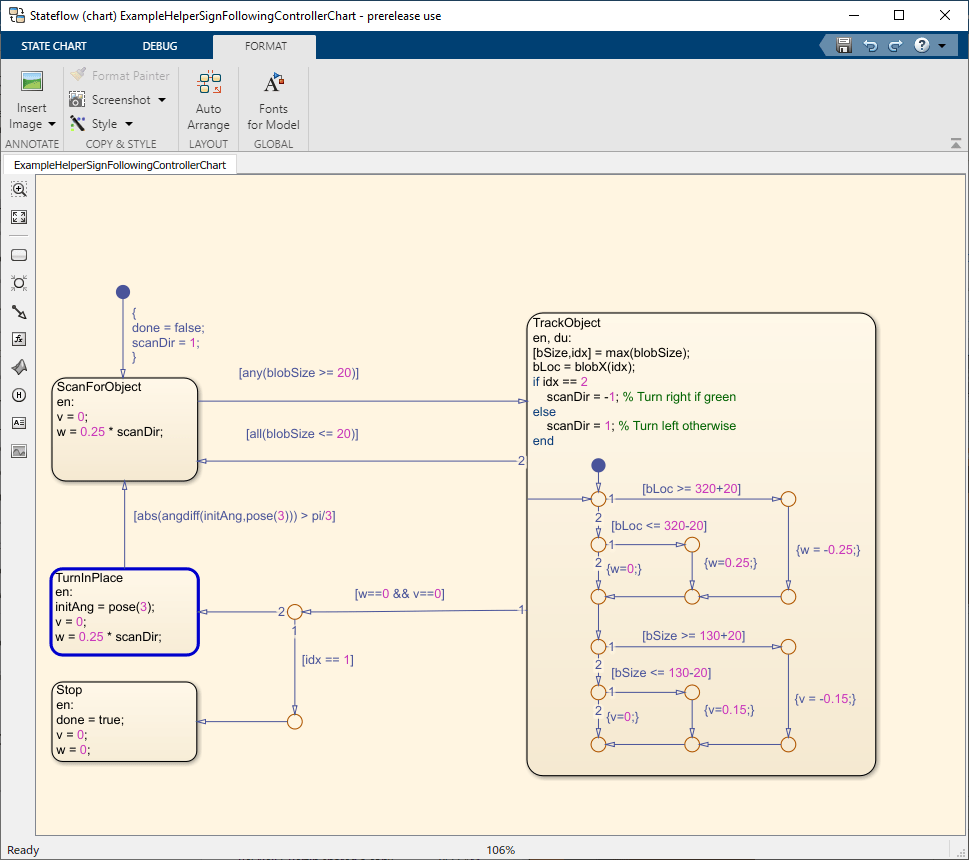
Sign-Following Robot with ROS 2 in MATLAB
Control a simulated robot running on a separate ROS-based simulator over ROS 2 network in MATLAB and generate a ROS 2 node for the control algorithm to deploy it to a remote device.
Sign-Following Robot with ROS in Simulink
Use Simulink to control a simulated robot running on a separate ROS-based simulator.
Sign-Following Robot with ROS 2 in Simulink
Use Simulink to control a simulated robot running on a separate ROS-based simulator over ROS 2 network.
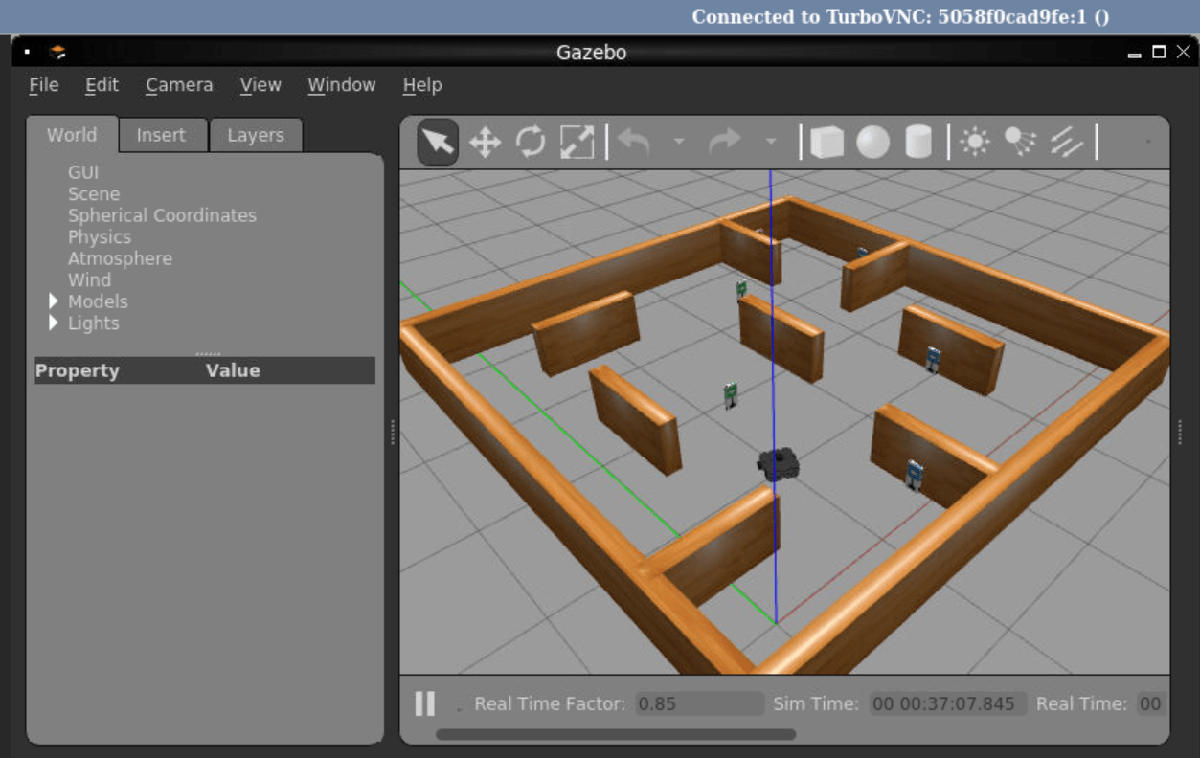
Generate and Deploy ROS 2 Component Nodes for Sign Following Robot Using Simulink
Generate ROS 2 component nodes from Simulink® for handling perception and tracking logic of a sign-following robot. It also shows how to load and run the generated ROS 2 components in a docker container running the simulated robot in Gazebo.

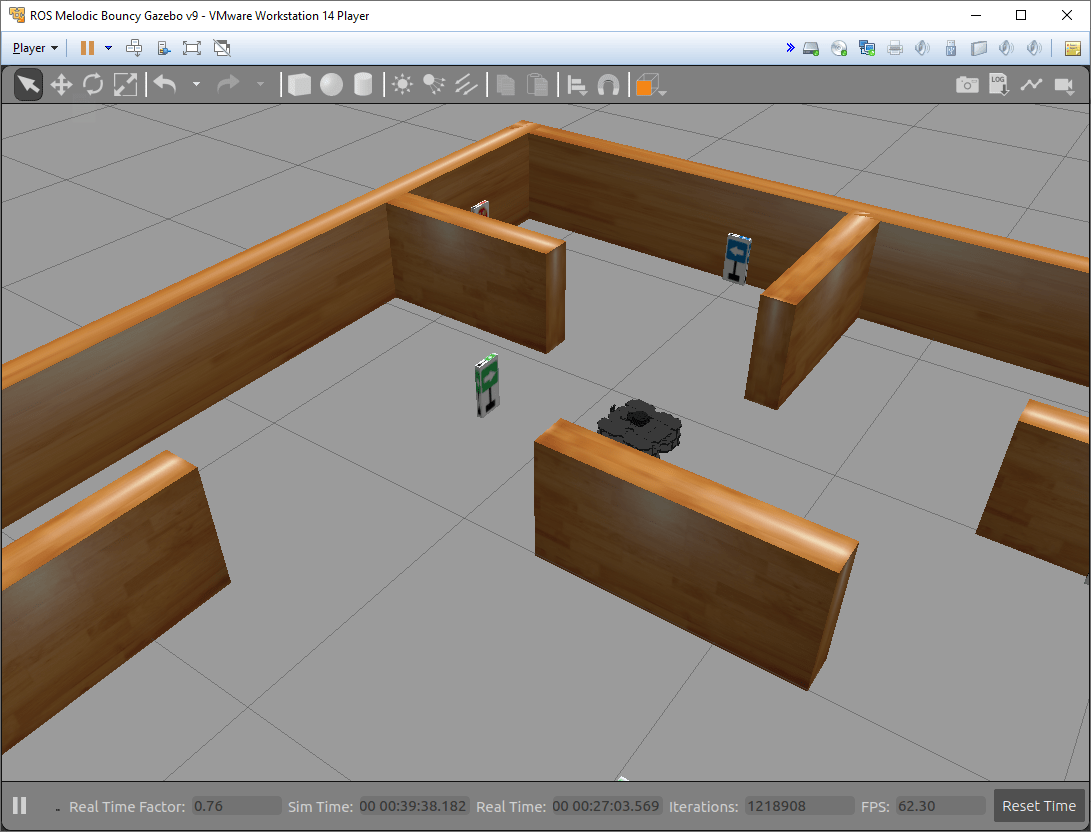
Sign Following Robot with Time Synchronization Using ROS and Gazebo Co-Simulation
Use Simulink to enable synchronized simulation between ROS and the Gazebo robot simulator using the Gazebo Pacer block.
Sign Following Robot Using YOLOv2 Detection Algorithm with ROS in Simulink
Use Simulink to control a simulated robot running on a separate ROS-based simulator and generate CUDA-optimized code for the ROS node, from the Simulink model, and deploy it to the localhost device.
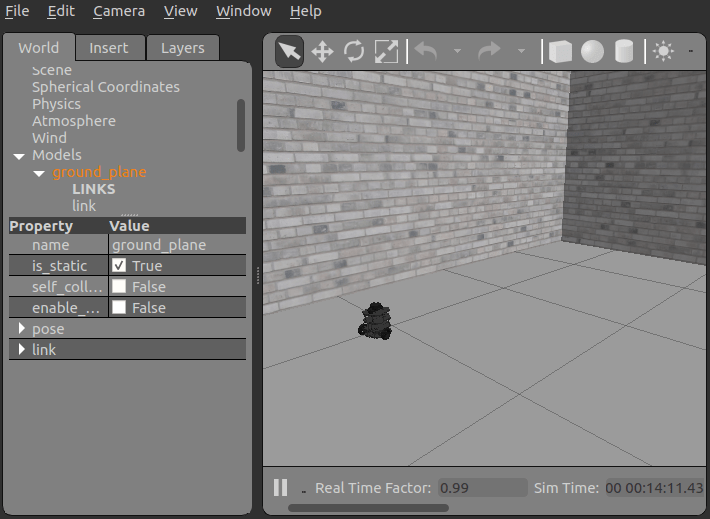
Test Robot Autonomy in Simulation
Explore MATLAB control of the Gazebo® Simulator.
Track and Follow an Object
Explore the autonomous behavior that incorporates the Kinect® camera, where the algorithm involves the TurtleBot® looking for a blue ball and then staying at a fixed distance from the ball.

Explore Basic Behavior of the TurtleBot
Explore basic autonomy with the TurtleBot, where the described behavior drives the robot forward and changes its direction when there is an obstacle.
Manage Quality of Service Policies in ROS 2 Application with TurtleBot
Demonstrates the best practices in managing Quality of Service (QoS) policies for an application using ROS 2.
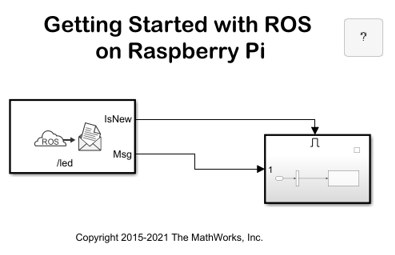
Get Started with Robot Operating System on Raspberry Pi
Build a standalone robot operating system (ROS) node from a Simulink® model on a Raspberry Pi® hardware board.
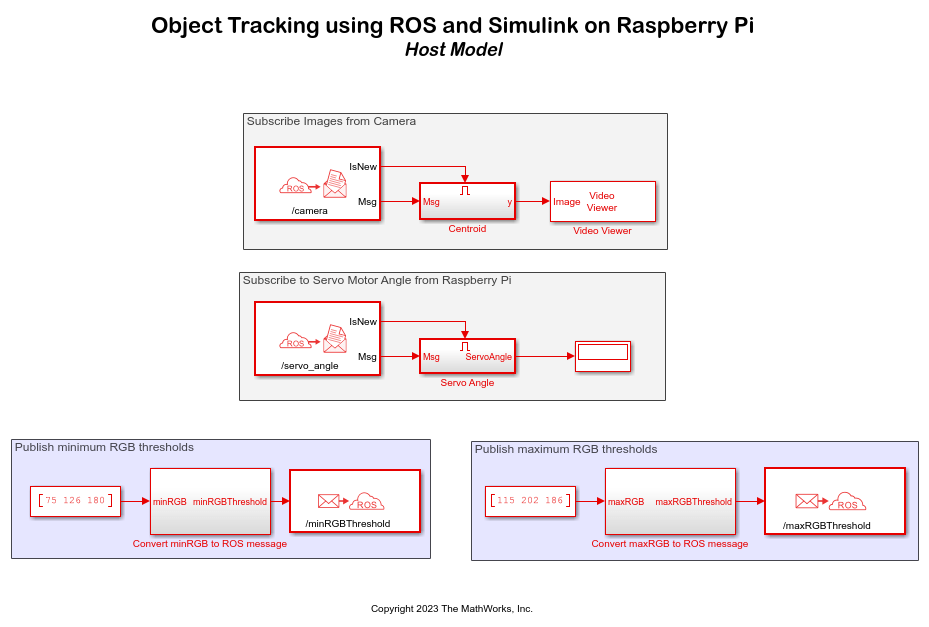
Track Object Using ROS and Simulink on Raspberry Pi
Use Raspberry Pi® Blockset, ROS Toolbox, and a Raspberry Pi hardware board to track a green colored object. This example also shows how to use the Publish and Subscribe blocks to establish communication between the ROS node deployed on the Raspberry Pi hardware board and the ROS node in Simulink (host computer).

Read Lidar Laser Scan Data over ROS from Raspberry Pi
Use Raspberry Pi® Blockset to read and receive a 2-D lidar scan data of an indoor environment from a ROS network using the Raspberry Pi hardware board.
Stream Images from Raspberry Pi Using Robot Operating System
Stream images captured from a webcam on a Raspberry Pi® board to the host computer using a ROS communication interface. In this example, you stream images from your Raspberry Pi board to your host computer using the ROS Publish blocks. You use the ROS MATLAB® command line interface to display the images on your host computer.