ROS 対応シミュレーターへの接続
ROS Toolbox は、MATLAB® および Simulink® を使用したアプリケーションのシミュレーションと展開のための ROS 対応シミュレーターへの接続をサポートします。このページには、ROS Toolbox を使用したこれらの ROS 対応シミュレーターへの接続を示す例が一覧表示されています。
Gazebo シミュレーター
Unity® ゲーム エンジン
CARLA シミュレーター
NVIDIA® Isaac Sim
MATLAB および Simulink でロボットと自律システムの知覚、モーション プランニング、制御用のアルゴリズムを設計し、アルゴリズムを実環境に展開する前にシミュレーターでシミュレーションできます。
ROS Toolbox は、MATLAB と Simulink、および ROS 対応シミュレーター間のネットワークを確立するミドルウェアとして機能します。外部シミュレーターでエンティティを設定して接続し、ROS Toolbox を使用して作成された通信チャネルを使用してエンティティを制御できます。
トピック
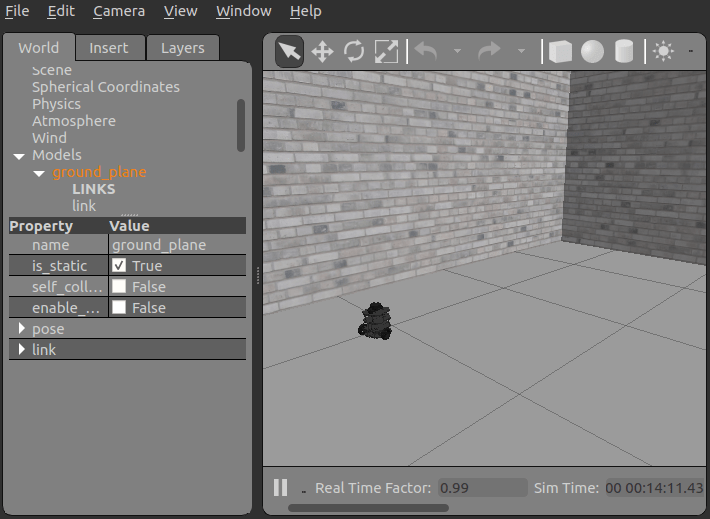
- Gazebo およびシミュレートされた TurtleBot の入門
Gazebo® シミュレーター エンジンを設定し、シミュレートされた TurtleBot® を使用して Gazebo をさらに探索する。
- Set Up and Connect to Unity Game Engine
Set up and connect to Unity Game Engine using ROS Toolbox to simulate various robotic manipulator applications.
- Set Up and Connect to CARLA Simulator
Set up and connect to the CARLA simulator using ROS Toolbox to simulate autonomous driving applications.
- Set Up and Connect to NVIDIA Isaac Sim
Set Up and connect to NVIDIA Isaac Sim® application to simulate universal-scene-description-based (USD-based) 3-D workflows and applications.
注目の例

Add, Build, and Remove Objects in Gazebo
Explore more in-depth interaction with the Gazebo® Simulator from MATLAB, such as creating simple models, adding links and joints to models, connecting models together, and applying forces to bodies.
Apply Forces and Torques in Gazebo
A collection of ways to apply forces and torques to models in the Gazebo® simulator.
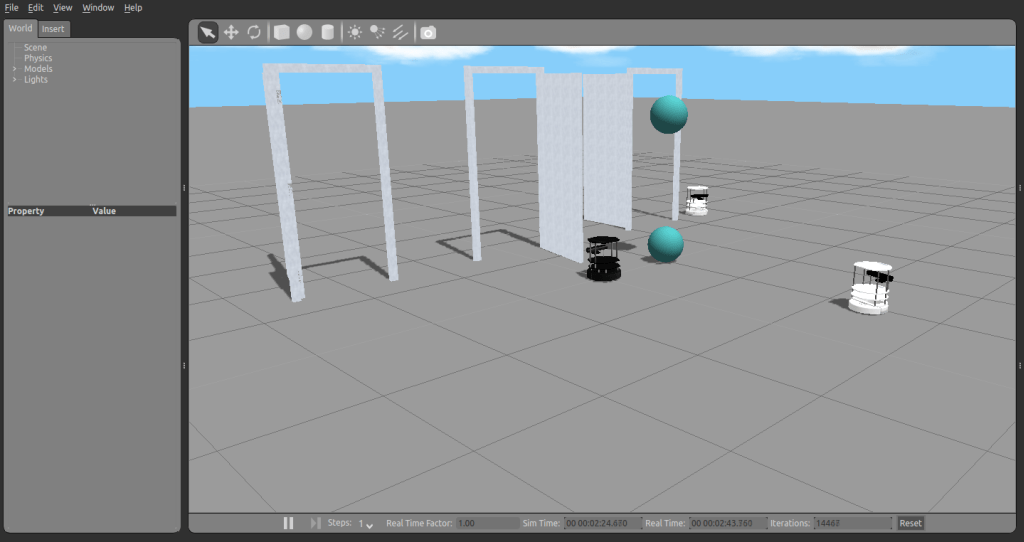
Test Robot Autonomy in Simulation
Explore MATLAB control of the Gazebo® Simulator.

Feedback Control of a ROS-Enabled Robot
Use Simulink to control a simulated robot running in a separate ROS-based simulator.
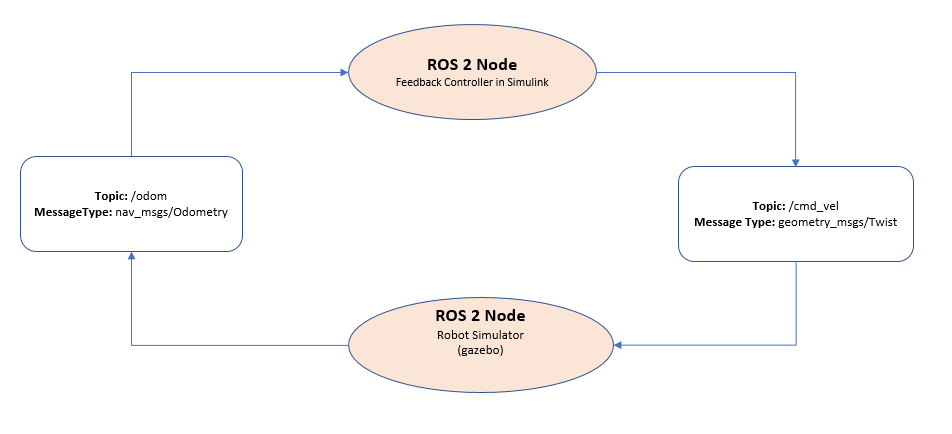
Feedback Control of a ROS-Enabled Robot over ROS 2
Use Simulink to control a simulated robot running in a Gazebo robot simulator over ROS 2 network.
Track and Follow an Object
Explore the autonomous behavior that incorporates the Kinect® camera, where the algorithm involves the TurtleBot looking for a blue ball and then staying at a fixed distance from the ball.
Control the TurtleBot with Teleoperation
Demonstrates keyboard control of the TurtleBot through the use of the
ExampleHelperTurtleBotCommunicator class.

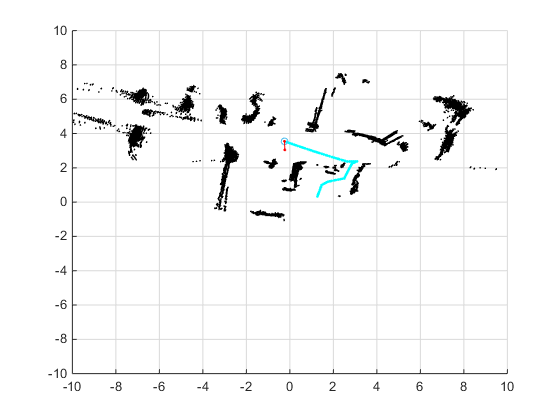
Obstacle Avoidance with TurtleBot and VFH
Use a TurtleBot with Vector Field Histograms to perform obstacle avoidance when driving a robot in an environment.
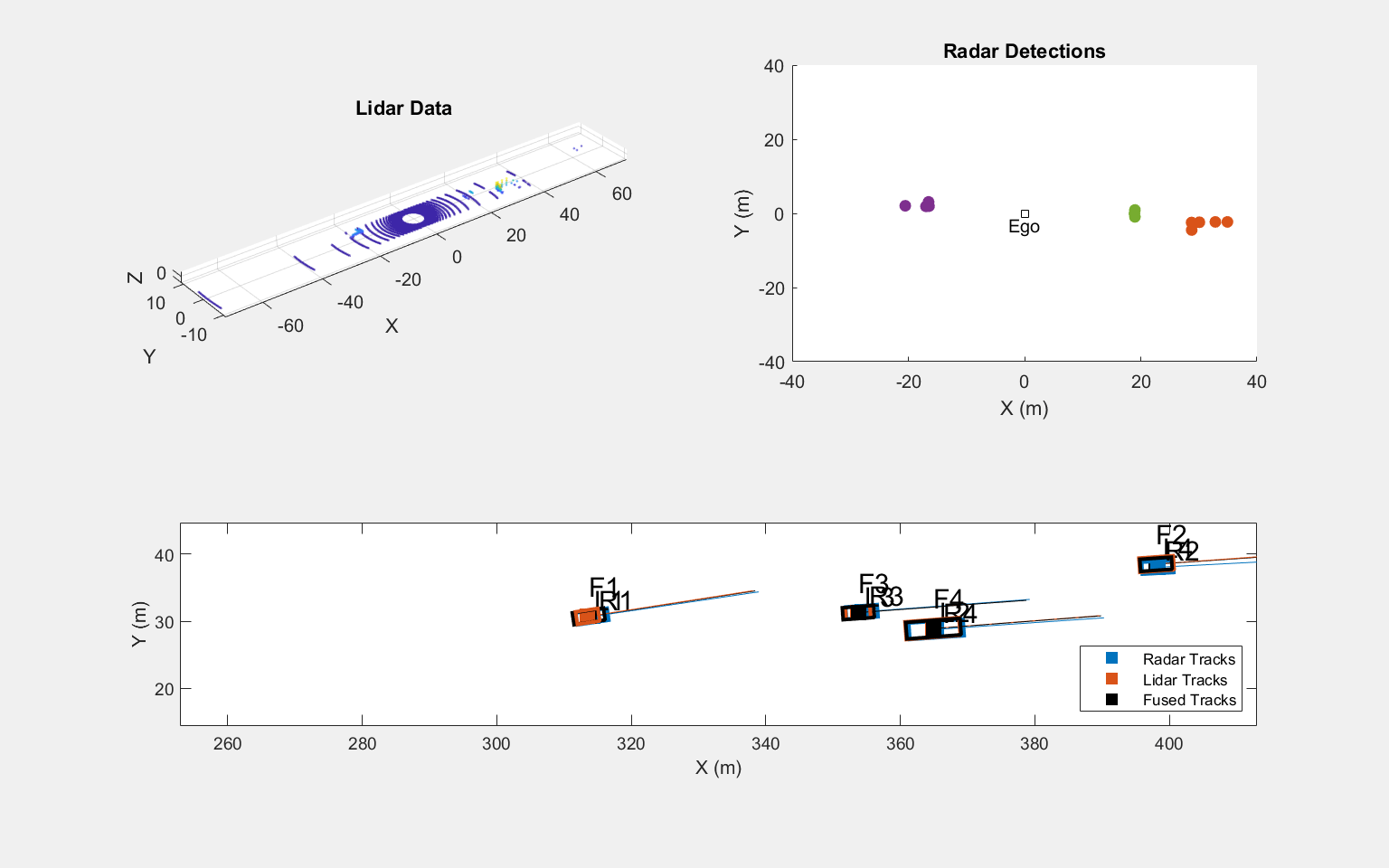
Fusion of Radar and Lidar Data Using ROS
Perform track-level sensor fusion on recorded LiDAR sensor data for a driving scenario recorded on a rosbag.

Generate a ROS Control Plugin from Simulink
Generate and build a ros_control plugin from a Simulink model.

Unity 3D での ROS を使用したピックアンドプレース ワークフロー
Kinova® Gen3 などのロボット マニピュレーター用のエンドツーエンドのピックアンドプレース ワークフローを設定し、Unity ゲーム エンジンでロボットをシミュレートする。

Emergency Braking of Ego Vehicle in CARLA Simulator Using Simulink and CARLA ROS Bridge
Emergency braking of ego vehicle in CARLA using Simulink.

Control NVIDIA Carter Robot in Isaac Sim Using ROS 2
Publish ROS 2 messages from MATLAB to NVIDIA Carter robot and subscribe to the published topics.