fminimax
ミニマックス制約付き問題を解く
構文
説明
fminimax は、一連の目的関数の最大値を最小化する点を探します。
この問題には任意のタイプの制約が含まれます。具体的には、fminimax は、以下で指定される問題の最小値を求めます。
ここで、b と beq はベクトル、A と Aeq は行列、ineqnonlin(x)、eqnonlin(x)、F(x) はベクトルを返す関数です。F(x)、ineqnonlin(x)、eqnonlin(x) を非線形関数にすることもできます。
x、lb および ub はベクトルまたは行列として渡すことができます。行列引数を参照してください。
また、単位行列を使用して、fminimax で最大最小の問題を解くこともできます。
以下の形式の問題を解くことができます。
この問題を解くには AbsoluteMaxObjectiveCount オプションを使用します。1 つの目的関数の絶対値を使用したミニマックス問題の解法を参照してください。
x = fminimax(fun,x0)x0 を開始値として fun に記述する関数のミニマックス解 x を求めます。
メモ
追加パラメーターの受け渡し は、必要に応じて他のパラメーターを目的関数と非線形制約関数に渡す方法を説明します。
例
関数 sin および cos と、区間 [–pi,pi] でのこれらの関数の最大値のプロットを作成します。
t = linspace(-pi,pi); plot(t,sin(t),"r-") hold on plot(t,cos(t),"b-"); plot(t,max(sin(t),cos(t)),"ko") legend("sin(t)","cos(t)","max(sin(t),cos(t))",Location="northwest")

このプロットは、最大値の 2 つの局所的最小値 (1 に近い値と –2 に近い値) を示しています。1 に近い最小値を求めます。
fun = @(x)[sin(x);cos(x)]; x0 = 1; x1 = fminimax(fun,x0)
Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
x1 = 0.7854
–2 に近い最小値を求めます。
x0 = -2; x2 = fminimax(fun,x0)
Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
x2 = -2.3562
この例の目的関数は、線形であり定数です。目的関数の詳細とプロットについては、fminimax と fminunc の比較を参照してください。
3 つのベクトル および 3 つの定数 について、 の形式の 3 つの線形関数として目的関数を設定します。
a = [1;1]; b = [-1;1]; c = [0;-1]; a0 = 2; b0 = -3; c0 = 4; fun = @(x)[x*a+a0,x*b+b0,x*c+c0];
不等式 x(1) + 3*x(2) <= –4 を制約とするミニマックス点を求めます。
A = [1,3]; b = -4; x0 = [-1,-2]; x = fminimax(fun,x0,A,b)
Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
x = 1×2
-5.8000 0.6000
この例の目的関数は、線形であり定数です。目的関数の詳細とプロットについては、fminimax と fminunc の比較を参照してください。
3 つのベクトル および 3 つの定数 について、 の形式の 3 つの線形関数として目的関数を設定します。
a = [1;1]; b = [-1;1]; c = [0;-1]; a0 = 2; b0 = -3; c0 = 4; fun = @(x)[x*a+a0,x*b+b0,x*c+c0];
範囲 –2 <= x(1) <= 2 および –1 <= x(2) <= 1 を設定し、[0,0] から始めてミニマックス問題を解きます。
lb = [-2,-1];
ub = [2,1];
x0 = [0,0];
A = []; % No linear constraints
b = [];
Aeq = [];
beq = [];
[x,fval] = fminimax(fun,x0,A,b,Aeq,beq,lb,ub)Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
x = 1×2
-0.0000 1.0000
fval = 1×3
3.0000 -2.0000 3.0000
この場合、解は一意ではありません。多くの点が制約を満たし、ミニマックス値が同じになります。3 つの目的関数の最大値を表す表面をプロットし、ミニマックス値が同じになる点を示す赤い線をプロットします。
[X,Y] = meshgrid(linspace(-2,2),linspace(-1,1)); Z = max(fun([X(:),Y(:)]),[],2); Z = reshape(Z,size(X)); surf(X,Y,Z,'LineStyle','none') view(-118,28) hold on line([-2,0],[1,1],[3,3],'Color','r','LineWidth',8) hold off

この例の目的関数は、線形であり定数です。目的関数の詳細とプロットについては、fminimax と fminunc の比較を参照してください。
3 つのベクトル および 3 つの定数 について、 の形式の 3 つの線形関数として目的関数を設定します。
a = [1;1]; b = [-1;1]; c = [0;-1]; a0 = 2; b0 = -3; c0 = 4; fun = @(x)[x*a+a0,x*b+b0,x*c+c0];
関数 unitdisk は、非線形不等式制約 を表します。
function [ineqnonlin,eqnonlin] = unitdisk(x) ineqnonlin = x(1)^2 + x(2)^2 - 1; eqnonlin = []; end
x0 = [0,0] から開始して、unitdisk を制約とするミニマックス問題を解きます。
x0 = [0,0];
A = []; % No other constraints
b = [];
Aeq = [];
beq = [];
lb = [];
ub = [];
nonlcon = @unitdisk;
x = fminimax(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon)Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
x = 1×2
-0.0000 1.0000
fminimax は、AbsoluteMaxObjectiveCount オプションを使用して、 の最初のいくつかの値について または のいずれかの最大値を最小化できます。 個の目的関数の絶対値を最小化するには、 から が絶対値の最小化の目的関数となるように目的関数値を配置し、AbsoluteMaxObjectiveCount オプションを k に設定します。
この例では、sin と cos の最大値を最小化し、sin を最初の目的関数に指定し、AbsoluteMaxObjectiveCount を 1 に設定します。
fun = @(x)[sin(x),cos(x)]; options = optimoptions("fminimax",AbsoluteMaxObjectiveCount=1); x0 = 1; A = []; % No constraints b = []; Aeq = []; beq = []; lb = []; ub = []; nonlcon = []; x1 = fminimax(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)
Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
x1 = 0.7854
まず x0 = –2 から試します。
x0 = -2; x2 = fminimax(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)
Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
x2 = -3.1416
関数をプロットします。
t = linspace(-pi,pi); plot(t,max(abs(sin(t)),cos(t)))
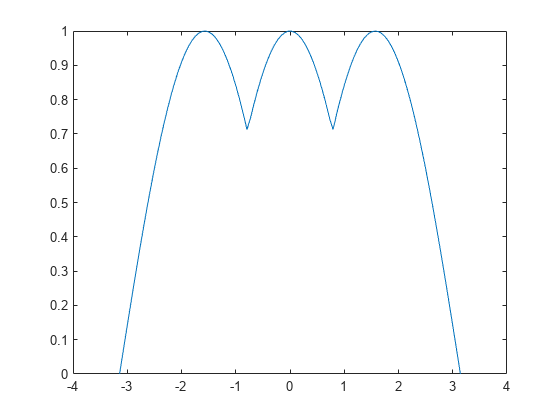
AbsoluteMaxObjectiveCount オプションの効果を確認するには、このプロットとsin と cos の最大値の最小化の例のプロットを比較します。
ミニマックス点の位置と目的関数の値の両方を取得します。目的関数の詳細とプロットについては、fminimax と fminunc の比較を参照してください。
3 つのベクトル および 3 つの定数 について、 の形式の 3 つの線形関数として目的関数を設定します。
a = [1;1]; b = [-1;1]; c = [0;-1]; a0 = 2; b0 = -3; c0 = 4; fun = @(x)[x*a+a0,x*b+b0,x*c+c0];
初期点を [0,0] に設定し、ミニマックス点とミニマックス値を求めます。
x0 = [0,0]; [x,fval] = fminimax(fun,x0)
Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
x = 1×2
-2.5000 2.2500
fval = 1×3
1.7500 1.7500 1.7500
3 つすべての目的関数のミニマックス点での値が同じになります。制約なしの問題には、一般的に、解において等しくなる目的関数が少なくとも 2 つあります。これは、点が任意の目的関数の局所的最小値ではなく、1 つの目的関数にのみ最大値がある場合、目的関数の最大値をより小さくできるためです。
この例の目的関数は、線形であり定数です。目的関数の詳細とプロットについては、fminimax と fminunc の比較を参照してください。
3 つのベクトル および 3 つの定数 について、 の形式の 3 つの線形関数として目的関数を設定します。
a = [1;1]; b = [-1;1]; c = [0;-1]; a0 = 2; b0 = -3; c0 = 4; fun = @(x)[x*a+a0,x*b+b0,x*c+c0];
不等式 x(1) + 3*x(2) <= –4 を制約とするミニマックス点を求めます。
A = [1,3]; b = -4; x0 = [-1,-2];
反復表示のオプションを設定し、すべてのソルバー出力を取得します。
options = optimoptions("fminimax",Display="iter"); Aeq = []; % No other constraints beq = []; lb = []; ub = []; nonlcon = []; [x,fval,maxfval,exitflag,output,lambda] =... fminimax(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)
Objective Max Line search Directional
Iter F-count value constraint steplength derivative Procedure
0 4 0 6
1 9 5 0 1 0.981
2 14 4.889 0 1 -0.302 Hessian modified twice
3 19 3.4 8.132e-09 1 -0.302 Hessian modified twice
Local minimum possible. Constraints satisfied.
fminimax stopped because the size of the current search direction is less than
twice the value of the step size tolerance and constraints are
satisfied to within the value of the constraint tolerance.
<stopping criteria details>
x = 1×2
-5.8000 0.6000
fval = 1×3
-3.2000 3.4000 3.4000
maxfval = 3.4000
exitflag = 4
output = struct with fields:
iterations: 4
funcCount: 19
lssteplength: 1
stepsize: 6.0684e-10
algorithm: 'active-set'
firstorderopt: []
constrviolation: 8.1323e-09
message: 'Local minimum possible. Constraints satisfied.↵↵fminimax stopped because the size of the current search direction is less than↵twice the value of the step size tolerance and constraints are ↵satisfied to within the value of the constraint tolerance.↵↵<stopping criteria details>↵↵Optimization stopped because the norm of the current search direction, 4.555376e-10,↵is less than 2*options.StepTolerance = 1.000000e-06, and the maximum constraint ↵violation, 8.132311e-09, is less than options.ConstraintTolerance = 1.000000e-06.'
lambda = struct with fields:
lower: [2×1 double]
upper: [2×1 double]
eqlin: [0×1 double]
eqnonlin: [0×1 double]
ineqlin: 0.2000
ineqnonlin: [0×1 double]
返される情報を確認します。
解において 2 つの目的関数値が等しくなっています。
ソルバーが 4 回の反復と 19 回の関数評価で収束しています。
lambda.ineqlinの値が非ゼロです。これは、線形制約が解においてアクティブであることを示します。
入力引数
出力引数
アルゴリズム
fminimax は、ゴール到達問題に変換し、変換されたゴール到達問題を fgoalattain を使用して解くことによって、ミニマックス問題を解きます。変換によってすべてのゴールが 0、すべての重みが 1 に設定されます。多目的関数の最適化アルゴリズムの式 1を参照してください。
代替機能
アプリ
[最適化] ライブ エディター タスクが fminimax にビジュアル インターフェイスを提供します。
拡張機能
バージョン履歴
R2006a より前に導入