makehgtform
4 行 4 列の変換行列の作成
構文
説明
単位行列
M = makehgtformTransform オブジェクトに適用すると、その子オブジェクトがそれらの元の向き、位置、サイズにリセットされます。
スケーリング行列
回転行列
M = makehgtform("axisrotate",[rx ry rz],r)Transform オブジェクトを軸 [rx ry rz] を中心に反時計回りに r ラジアン回転する変換行列を返します。
平行移動行列
M = makehgtform("translate",[tx ty tz])Transform オブジェクトを "x" 軸方向に tx 単位、"y" 軸方向に ty 単位、"z" 軸方向に tz 単位平行移動する変換行列を返します。特定の軸方向の平行移動を行わない場合は、対応する平行移動距離を 0 と指定します。たとえば、makehgtform("translate",[0 0 5]) は、"z" 軸方向にのみ 5 単位平行移動する変換行列を作成します。
M = makehgtform("translate",tx,ty,tz)
メモ
リストされた構文で 2 つ以上の入力引数の組み合わせを使用することで、複数の変換を指定できます。たとえば、makehgtform("xrotate",pi,"scale",4) は、一様に 4 だけスケーリングし、"x" 軸を中心に pi ラジアン回転させます。任意の数の変換を任意の順序で指定することができ、makehgtform ではそれらの変換が逆の順序で適用されます。指定した変換の順序が結果の変換行列にどのように影響するかの詳細については、複数の変換の適用を参照してください。
例
スケーリング変換行列を使用して、グラフィックス オブジェクトをスケーリングできます。
まず、座標軸を作成し、表示を調整します。グリッド ラインを表示し、座標軸にラベルを付けます。
ax = axes("XLim",[-1.5 1.5],"YLim",[-1.5 1.5],"ZLim",[-1.5 1.5]); view(3) grid on xlabel(ax,"x-axis"); ylabel(ax,"y-axis"); zlabel(ax,"z-axis");
球面を作成します。
[x,y,z] = sphere; s = surface(x,y,z);

Transform オブジェクトを作成し、球面に変換を適用できるようにそのオブジェクトを球面の親にします。
h = hgtransform; s.Parent = h;
球面をスケーリングして 50% 大きくする変換行列を作成します。Transform オブジェクト h の Matrix プロパティを設定して球面に変換行列を適用します。
S = makehgtform("scale",1.5);
h.Matrix = S;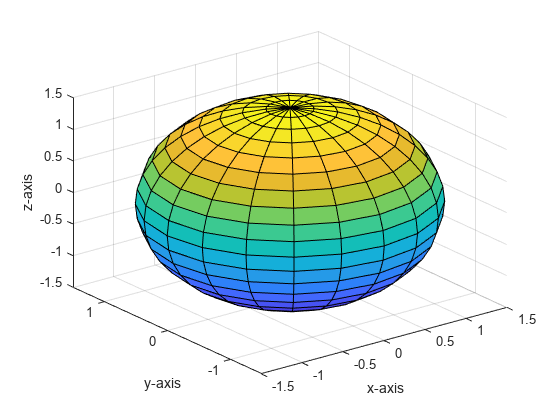
回転変換行列を使用して、指定した回転軸を中心にグラフィックス オブジェクトを回転できます。
まず、座標軸を作成し、表示を調整します。グリッド ラインを表示し、座標軸にラベルを付けます。
ax = axes("XLim",[-5 20],"YLim",[0 20],"ZLim",[-5 20]); view(3) grid on xlabel(ax,"x-axis"); ylabel(ax,"y-axis"); zlabel(ax,"z-axis");
Transform オブジェクトを作成します。次に、青色の四角形を作成し、それに変換を適用できるように Transform オブジェクトをその親にします。
h = hgtransform; r = rectangle(ax,Position=[0 10 5 10],FaceColor="b"); r.Parent = h; hold on
点 (rx,ry,rz) を指定して回転軸を定義します。原点とこの点を通るラインが軸になります。ラインをプロットして、それを中心とする四角形の回転を可視化します。
rx = 10;
ry = 15;
rz = 10;
plot3(ax,[0 rx],[0 ry],[0 rz])
hold off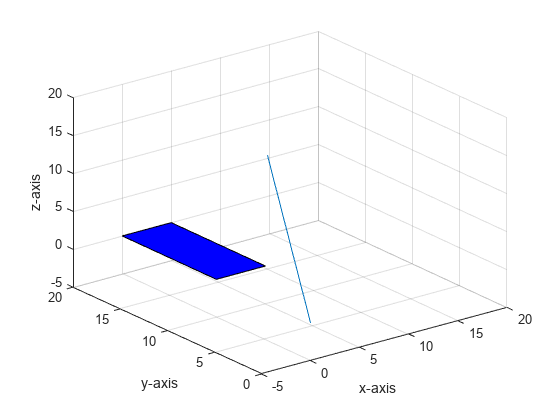
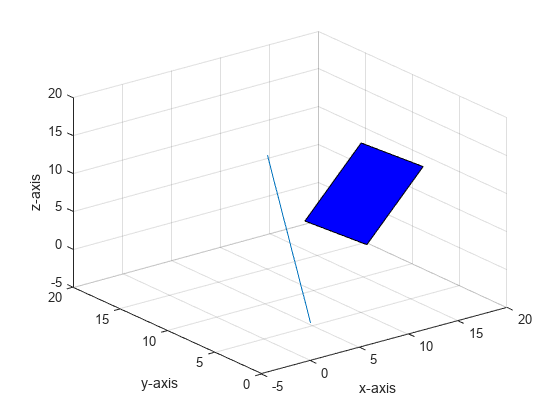
四角形を回転軸を中心に pi ラジアン回転するアニメーションを作成します。四角形を回転する変換行列を定義します。この回転行列を Transform オブジェクトに適用し、ループの各反復で回転角度をインクリメントします。
for r=0:0.3:pi R = makehgtform("axisrotate",[rx ry rz],r); h.Matrix = R; drawnow pause(0.1) end
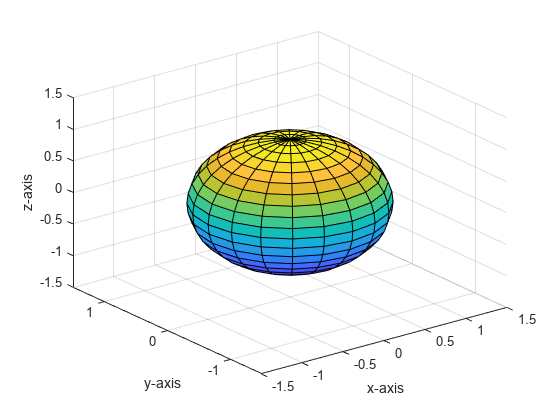
平行移動変換行列を使用して、グラフィックス オブジェクトを平行移動できます。
まず、座標軸を作成し、表示を調整します。グリッド ラインを表示し、座標軸にラベルを付けます。
ax = axes("XLim",[-1.5 1.5],"YLim",[-1.5 1.5],"ZLim",[-1.5 1.5]); view(3) grid on xlabel(ax,"x-axis"); ylabel(ax,"y-axis"); zlabel(ax,"z-axis");
球面を作成します。
[x,y,z] = sphere; s = surface(x,y,z);
Transform オブジェクトを作成し、球面に変換を適用できるようにそのオブジェクトを球面の親にします。
h = hgtransform; s.Parent = h;
次に、球面を x 軸方向に 0.5 単位、z 軸方向に 0.5 単位平行移動する変換行列を作成します。Transform オブジェクト h の Matrix プロパティを設定して球面に変換行列を適用します。
Txz = makehgtform("translate",[0.5 0 0.5]);
h.Matrix = Txz;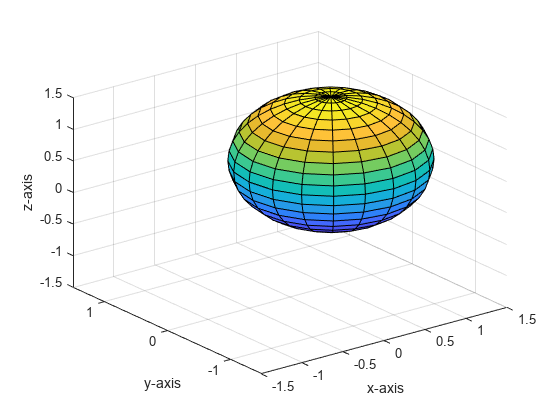
makehgtform の 1 つの呼び出しで複数の変換を指定できます。MATLAB® は、指定されたすべての変換を 1 つに合成した変換行列を返します。この例では、グラフィックスを "x" 軸と "y" 軸の両方を中心に回転します。
まず、座標軸を作成し、表示を調整します。グリッド ラインを表示し、座標軸にラベルを付けます。
ax = axes("XLim",[-1.5 1.5],"YLim",[-1.5 1.5],"ZLim",[-1.5 1.5]); view(3) grid on xlabel(ax,"x-axis"); ylabel(ax,"y-axis"); zlabel(ax,"z-axis");
回転する Surface オブジェクトを作成し、それらを配列 s に格納します。
[x,y,z] = cylinder([0.2 0]); s(1) = surface(x,y,z,FaceColor="red"); s(2) = surface(x,y,-z,FaceColor="green"); s(3) = surface(z,x,y,FaceColor="blue"); s(4) = surface(-z,x,y,FaceColor="cyan"); s(5) = surface(y,z,x,FaceColor="magenta"); s(6) = surface(y,-z,x,FaceColor="yellow");
Transform オブジェクトを作成し、それを Surface オブジェクトの親にします。
h = hgtransform;
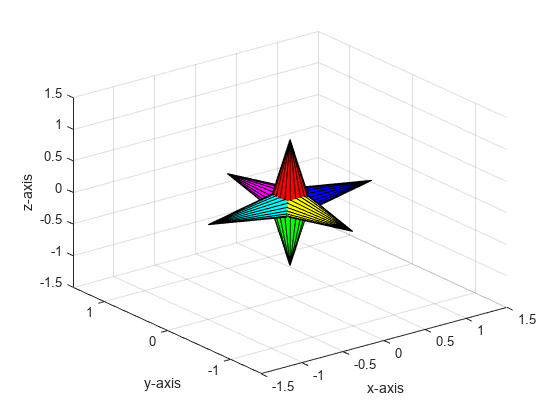
set(s,"Parent",h)最初に "x" 軸、次に "y" 軸を中心に回転を実行する回転行列を作成します。関数 makehgtform の単一の呼び出しで複数の変換を指定すると、右から左の順に変換が適用されます。Transform オブジェクト h の Matrix プロパティを設定して変換行列を適用します。
m1 = makehgtform("yrotate",pi/2,"xrotate",pi/2); h.Matrix = m1;
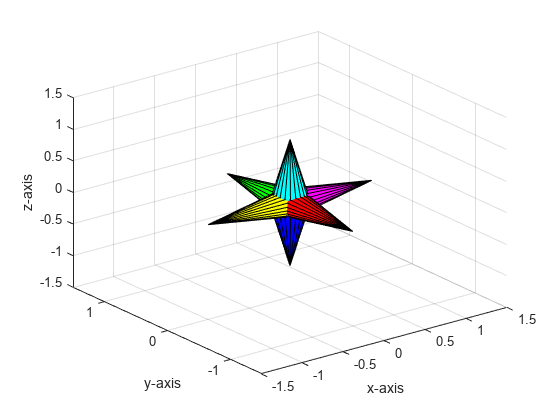
2 つの別々の回転行列を作成してそれらを乗算しても、同じ変換行列が得られます。
mx = makehgtform("xrotate",pi/2); my = makehgtform("yrotate",pi/2); m2 = my*mx; h.Matrix = m2;

入力引数
出力引数
詳細
バージョン履歴
R2006a より前に導入