lsqr
連立線形方程式の求解 — 最小二乗法
構文
説明
例
lsqr を既定の設定で使用して方形線形システムを解き、次にその求解のプロセスで使用される許容誤差と反復の回数を調整します。
密度が 50% の乱数スパース行列 A を作成します。また、 の右辺に乱数のベクトル b を作成します。
rng default
A = sprand(400,300,.5);
b = rand(400,1);lsqr を使用して を解きます。出力の表示には相対残差誤差 の値が含まれます。
x = lsqr(A,b);
lsqr stopped at iteration 20 without converging to the desired tolerance 1e-06 because the maximum number of iterations was reached. The iterate returned (number 20) has relative residual 0.26.
既定では lsqr は 20 回の反復と 1e-6 の許容誤差を使用しますが、アルゴリズムではこの行列についてはその 20 回の反復で収束できません。残差がまだ大きいため、より多くの反復 (または前処理行列) が必要であることを示しています。より大きな許容誤差を使用して、アルゴリズムの収束をより簡単にすることもできます。
1e-4 の許容誤差と 70 回の反復を使用して、再度方程式を解きます。計算された解の相対残差 relres を返す 6 つの出力を、残差履歴 resvec および最小二乗残差履歴 lsvec とともに指定します。
[x,flag,relres,iter,resvec,lsvec] = lsqr(A,b,1e-4,70); flag
flag = 0
flag が 0 であるため、アルゴリズムは指定された反復回数内に、想定される許容誤差を満たすことができました。一般的に、このようにして、許容誤差と反復回数を共に調整して、速度と精度の間のトレードオフを図ることができます。
計算された解の相対残差と最小二乗残差を調べます。
relres
relres = 0.2625
lsres = lsvec(end)
lsres = 2.7640e-04
これらの残差ノルムは、x が最小二乗解であることを示しています。relres が指定された 1e-4 の許容誤差よりも小さいためです。線形システムに定数解が存在しないため、ソルバーとしての最善は、最小二乗残差が許容誤差を満足するようにすることです。
残差履歴をプロットします。相対残差 resvec は最小値にすばやく到達し、それ以上進むことはできません。一方、最小二乗残差 lsvec は後続の反復で継続して最小化し続けます。
N = length(resvec); semilogy(0:N-1,lsvec,'--o',0:N-1,resvec,'-o') legend("Least-squares residual","Relative residual")

線形システムを解くために前処理行列を lsqr と使用する効果を調べます。
479 行 479 列の非対称実スパース行列 west0479 を読み込みます。
load west0479
A = west0479; に対する真の解がすべて 1 のベクトルになるように、b を定義します。
b = sum(A,2);
許容誤差と最大反復回数を設定します。
tol = 1e-12; maxit = 20;
lsqr を使用して、要求された許容誤差と反復回数で解を求めます。この求解プロセスについての情報を返す 6 つの出力を指定します。
xはA*x = bの計算された解です。flはアルゴリズムが収束したかどうかを示すフラグです。rrは計算解xの相対残差です。itはxが計算されたときの反復回数です。rvは の残差履歴のベクトルです。lsrvは最小二乗残差履歴のベクトルです。
[x,fl,rr,it,rv,lsrv] = lsqr(A,b,tol,maxit); fl
fl = 1
rr
rr = 0.0017
it
it = 20
fl = 1 であるため、アルゴリズムは最大反復回数内に指定された許容誤差に収束しませんでした。
遅い収束への対応として、前処理行列を指定できます。A は非対称であるため、ilu を使用して前処理行列 を因数分解形式で生成します。棄却許容誤差を指定して、1e-6 よりも小さい値をもつ非対角エントリを無視します。L と U を lsqr への M1 と M2 の入力として指定することで、 の前処理された方程式 を解きます。
setup = struct('type','ilutp','droptol',1e-6); [L,U] = ilu(A,setup); [x1,fl1,rr1,it1,rv1,lsrv1] = lsqr(A,b,tol,maxit,L,U); fl1
fl1 = 0
rr1
rr1 = 7.0954e-14
it1
it1 = 13
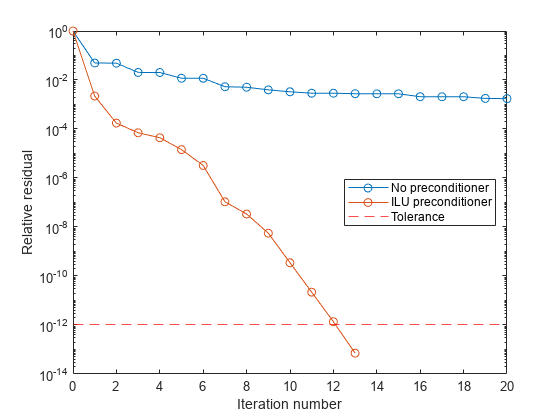
ilu 前処理行列を使用すると、13 回目の反復で 1e-12 の所定の許容誤差よりも小さい相対残差が得られます。出力 rv1(1) は norm(b)、出力 rv1(end) は norm(b-A*x1) になります。
各反復での相対残差をプロットして、lsqr の進行状況を確認できます。指定された許容誤差のラインと共に、それぞれの解の残差履歴をプロットします。
semilogy(0:length(rv)-1,rv/norm(b),'-o') hold on semilogy(0:length(rv1)-1,rv1/norm(b),'-o') yline(tol,'r--'); legend('No preconditioner','ILU preconditioner','Tolerance','Location','East') xlabel('Iteration number') ylabel('Relative residual')
lsqr に解の初期推定を指定する効果を調べます。
乱数の方形スパース行列を作成します。 の想定される解が 1 のベクトルとなるよう、 の右辺のベクトルとして各行の合計を使用します。
A = sprand(700,900,0.1); b = sum(A,2);
lsqr を使用して を 2 回解きます。1 回は既定の初期推定、もう 1 回は解の適切な初期推定を使用します。両方の解に対して 75 回の反復と既定の許容誤差を使用します。すべての要素が 0.99 と等価のベクトルとして初期推定を 2 番目の解に指定します。
maxit = 75; x1 = lsqr(A,b,[],maxit);
lsqr converged at iteration 64 to a solution with relative residual 8.7e-07.
x0 = 0.99*ones(size(A,2),1); x2 = lsqr(A,b,[],maxit,[],[],x0);
lsqr converged at iteration 26 to a solution with relative residual 9.6e-07.
初期推定が想定される解に近いため、lsqr はより少ない反復で収束できます。
中間結果を返す
for ループで lsqr を呼び出して、初期推定を使用して中間結果を取得することもできます。ソルバーを呼び出すたびに、数回の反復が行われ、計算された解が格納されます。その後、その解を次の反復のバッチに対する初期ベクトルとして使用します。
たとえば、次のコードは 100 回の反復を 4 回実行し、for ループを通過するたびに、解のベクトルを格納します。
x0 = zeros(size(A,2),1); tol = 1e-8; maxit = 100; for k = 1:4 [x,flag,relres] = lsqr(A,b,tol,maxit,[],[],x0); X(:,k) = x; R(k) = relres; x0 = x; end
X(:,k) は、for ループの反復 k で計算された解のベクトルであり、R(k) はその解の相対残差です。
lsqr に、係数行列 A の代わりに A*x および A'*x を計算する関数ハンドルを与えて線形システムを解きます。
非対称の三重対角行列を作成します。行列をプレビューします。
A = gallery('wilk',21) + diag(ones(20,1),1)A = 21×21
10 2 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
1 9 2 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 1 8 2 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 1 7 2 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 1 6 2 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 1 5 2 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 1 4 2 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 1 3 2 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 1 2 2 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 1 1 2 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 1 0 2 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 1 1 2 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 1 2 2 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 1 3 2 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 1 4 2 0 0 0 0 0
⋮
この三重対角行列は特殊な構造であるため、演算 A*x を関数ハンドルで表すことができます。A がベクトルを乗算する場合、結果のベクトルのほとんどの要素はゼロとなります。結果の非ゼロ要素は、A の非ゼロの三重対角要素に対応します。
式 は次のようになります。
.
結果のベクトルは、3 つのベクトルの合計として記述できます。
= 。
同様に、 の式は次のようになります。
.
.
MATLAB® では、これらのベクトルを作成する関数を記述し、それらを合計して、フラグの入力に基づいて A*x または A'*x の値を与えるようにします。
function y = afun(x,flag) if strcmp(flag,'notransp') % Compute A*x y = [0; x(1:20)] ... + [(10:-1:0)'; (1:10)'].*x ... + 2*[x(2:end); 0]; elseif strcmp(flag,'transp') % Compute A'*x y = 2*[0; x(1:20)] ... + [(10:-1:0)'; (1:10)'].*x ... + [x(2:end); 0]; end end
(この関数は、ローカル関数として例の最後に保存されています)
ここで、lsqr に A*x および A'*x を計算する関数ハンドルを与えて、線形システム を解きます。1e-6 の許容誤差と 25 回の反復を使用します。 の行の合計として を指定し、 の真の解が 1 のベクトルとなるようにします。
b = full(sum(A,2)); tol = 1e-6; maxit = 25; x1 = lsqr(@afun,b,tol,maxit)
lsqr converged at iteration 21 to a solution with relative residual 5.4e-13.
x1 = 21×1
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
⋮
ローカル関数
function y = afun(x,flag) if strcmp(flag,'notransp') % Compute A*x y = [0; x(1:20)] ... + [(10:-1:0)'; (1:10)'].*x ... + 2*[x(2:end); 0]; elseif strcmp(flag,'transp') % Compute A'*x y = 2*[0; x(1:20)] ... + [(10:-1:0)'; (1:10)'].*x ... + [x(2:end); 0]; end end
入力引数
出力引数
詳細
ヒント
ほとんどの反復メソッドにおける収束は、係数行列の条件数
cond(A)に依存します。Aが正方行列の場合、equilibrateを使用して条件数を改善することができ、それ自体でほとんどの反復ソルバーが収束しやすくなります。ただし、equilibrateを使用することでも、平衡化した行列B = R*P*A*Cを次に因子分解する際に前処理行列の品質が向上します。dissectやsymrcmなどの行列の並べ替え関数を使用して係数行列の行と列を並べ替え、係数行列が因子分解されて前処理行列が生成される際に非ゼロの数を最小化できます。これによって、後で前処理を使用した線形システムを解くのに必要なメモリと時間を削減できます。
参照
[1] Barrett, R., M. Berry, T. F. Chan, et al., Templates for the Solution of Linear Systems: Building Blocks for Iterative Methods, SIAM, Philadelphia, 1994.
[2] Paige, C. C. and M. A. Saunders, "LSQR: An Algorithm for Sparse Linear Equations And Sparse Least Squares," ACM Trans. Math. Soft., Vol.8, 1982, pp. 43-71.