equilibrate
条件を改善するための行列のスケーリング
説明
例
大きな条件数をもつ行列を平衡化して、反復ソルバー gmres による線形方程式の解の効率と安定性を改善します。
行列 west0479 を読み込みます。これは 479 行 479 列の実数値のスパース行列です。condest を使用して、行列の推定条件数を計算します。
load west0479
A = west0479;
c1 = condest(A)c1 = 1.4244e+12
反復 450 回、許容誤差 1e-11 を指定して gmres を使用し、線形方程式 を解いてみます。gmres が反復ごとに解の残差ノルムを返すように、5 つの出力を指定します (~ を使用して不要な出力を抑制)。残差ノルムを片対数プロットでプロットします。このプロットは、gmres が妥当な残差ノルムに到達できず、 について計算された解が信頼できないことを示します。
b = ones(size(A,1),1);
tol = 1e-11;
maxit = 450;
[x,flx,~,~,rvx] = gmres(A,b,[],tol,maxit);
semilogy(rvx)
title('Residual Norm at Each Iteration')
equilibrate を使用して、A の並べ替えと再スケーリングをします。より良い条件数をもち、かつ対角要素が 1 と -1 のみの新しい行列 B = R*P*A*C を作成します。
[P,R,C] = equilibrate(A); B = R*P*A*C; c2 = condest(B)
c2 = 5.1036e+04
equilibrate により返された出力を使用して、問題 を式 に書き換えることができます。ここで、、 です。この形式では、元の方程式の解を で復元できます。ただし、復元された解は、元の方程式の望ましい残差誤差をもたない可能性があります。詳細については、再スケーリングによる線形方程式の求解を参照してください。
gmres を使用して を について解き、反復ごとの残差ノルムを再プロットします。このプロットは、行列の平衡化によって問題の安定性が高まり、gmres が反復 200 回未満で目的の許容誤差 1e-11 に収束することを示します。
d = R*P*b; [y,fly,~,~,rvy] = gmres(B,d,[],tol,maxit); hold on semilogy(rvy) legend('Original', 'Equilibrated', 'Location', 'southeast') title('Relative Residual Norms (No Preconditioner)') hold off

前処理行列を使用した解の改善
行列 B を得た後に、gmres と共に使用する前処理行列を計算して、さらに問題の安定性を改善することができます。B の数値特性は元の行列 A の数値特性よりも優れているため、平衡化した行列を使用して前処理行列を計算することが望まれます。
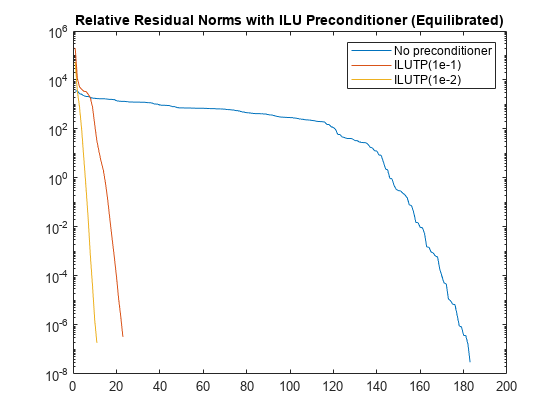
ilu を使用して 2 つの異なる前処理行列を計算し、それらを gmres の入力として使用して問題を再び解きます。比較のために、平衡化したノルムと同じプロットに反復ごとの残差ノルムをプロットします。このプロットは、平衡化した行列を使用した前処理行列の計算によって問題の安定性が大幅に高まり、gmres が反復 30 回未満で目的の許容誤差に達することを示します。
semilogy(rvy) hold on [L1,U1] = ilu(B,struct('type','ilutp','droptol',1e-1,'thresh',0)); [yp1,flyp1,~,~,rvyp1] = gmres(B,d,[],tol,maxit,L1,U1); semilogy(rvyp1) [L2,U2] = ilu(B,struct('type','ilutp','droptol',1e-2,'thresh',0)); [yp2,flyp2,~,~,rvyp2] = gmres(B,d,[],tol,maxit,L2,U2); semilogy(rvyp2) legend('No preconditioner', 'ILUTP(1e-1)', 'ILUTP(1e-2)') title('Relative Residual Norms with ILU Preconditioner (Equilibrated)') hold off
6 行 6 列の魔方陣行列を作成し、equilibrate を使用して行列を因数分解します。既定では、equilibrate は置換情報およびスケーリング係数を行列として返します。
A = magic(6)
A = 6×6
35 1 6 26 19 24
3 32 7 21 23 25
31 9 2 22 27 20
8 28 33 17 10 15
30 5 34 12 14 16
4 36 29 13 18 11
[P,R,C] = equilibrate(A)
P = 6×6
0 0 0 0 1 0
0 0 0 0 0 1
0 0 0 1 0 0
1 0 0 0 0 0
0 0 1 0 0 0
0 1 0 0 0 0
R = 6×6
0.1852 0 0 0 0 0
0 0.1749 0 0 0 0
0 0 0.1909 0 0 0
0 0 0 0.1588 0 0
0 0 0 0 0.1793 0
0 0 0 0 0 0.1966
C = 6×6
0.1799 0 0 0 0 0
0 0.1588 0 0 0 0
0 0 0.1588 0 0 0
0 0 0 0.2422 0 0
0 0 0 0 0.2066 0
0 0 0 0 0 0.2035
行列の因子 P、R、および C を使用して平衡行列 Bmatrix を作成します。
Bmatrix = R*P*A*C
Bmatrix = 6×6
1.0000 0.1471 1.0000 0.5385 0.5358 0.6031
0.1259 1.0000 0.8056 0.5509 0.6506 0.3916
0.2747 0.8485 1.0000 0.7859 0.3943 0.5825
1.0000 0.0252 0.1513 1.0000 0.6233 0.7754
1.0000 0.2562 0.0569 0.9553 1.0000 0.7295
0.1061 0.9988 0.2185 1.0000 0.9341 1.0000
次に、"vector" オプションを指定して出力をベクトルとして返します。入力行列が大きい場合、出力をベクトルとして返すとメモリ消費量が少なくなり、効率性が向上します。
[p,r,c] = equilibrate(A,"vector")p = 6×1
5
6
4
1
3
2
r = 6×1
0.1852
0.1749
0.1909
0.1588
0.1793
0.1966
c = 6×1
0.1799
0.1588
0.1588
0.2422
0.2066
0.2035
ベクトル出力 p、r、および c を使用して平衡行列 Bvector を作成します。
Bvector = r.*A(p,:).*c'
Bvector = 6×6
1.0000 0.1471 1.0000 0.5385 0.5358 0.6031
0.1259 1.0000 0.8056 0.5509 0.6506 0.3916
0.2747 0.8485 1.0000 0.7859 0.3943 0.5825
1.0000 0.0252 0.1513 1.0000 0.6233 0.7754
1.0000 0.2562 0.0569 0.9553 1.0000 0.7295
0.1061 0.9988 0.2185 1.0000 0.9341 1.0000
Bvector と Bmatrix を比較します。結果で等しいことが示されます。
norm(Bmatrix - Bvector)
ans = 0
入力引数
出力引数
詳細
参照
[1] Duff, I. S., and J. Koster. “On Algorithms For Permuting Large Entries to the Diagonal of a Sparse Matrix.” SIAM Journal on Matrix Analysis and Applications 22, no. 4 (January 2001): 973–96.