LiDAR の概要
LiDAR とは
"LiDAR" (Light Detection and Ranging) は、3 次元レーザー スキャンの手法です。
LiDAR センサーは、環境に関する 3 次元構造情報を提供します。先進運転支援システム (ADAS)、ロボット、無人航空機 (UAV) では、3 次元の知覚、ナビゲーション、および地図作成を正確に行うために、LiDAR センサーを採用しています。
LiDAR は、レーザー光を使用してシーン内のオブジェクトからセンサーまでの距離を測定するアクティブ リモート センシング システムです。LiDAR センサーはレーザー パルスを放射し、それが周囲のオブジェクトに反射します。その後センサーは、この反射した光を取得し、飛行時間の原則を使用してオブジェクトからの距離を測定し、周囲の構造を知覚することができます。

LiDAR センサーは、これらの反射したレーザー パルス、つまり "レーザー リターン" を、点の集合として格納します。この点の集合を "点群" と呼びます。
点群とは
点群とは、空間における 3 次元の点の集合です。イメージがカメラの出力であるように、点群は LiDAR センサーの出力です。
LiDAR センサーは、点群の各点で、位置 (xyz 座標)、レーザー光の強度、面法線などの属性を取得します。この情報を使用して、点群は環境の 3 次元マップを生成します。MATLAB® で、pointCloud オブジェクトを使用することにより、点群の情報を格納し、処理することができます。

点群はアンオーガナイズドまたはオーガナイズドとなります。アンオーガナイズド点群では、点は 3 次元座標の単一のストリームとして格納されます。オーガナイズド点群では、点は互いの空間関係に基づいて行と列に配置されます。オーガナイズド点群とアンオーガナイズド点群の詳細については、オーガナイズド点群とアンオーガナイズド点群とはを参照してください。
LiDAR のタイプ
LiDAR センサーのさまざまなタイプは、航空用途か地上用途かに基づいて大まかに分けることができます。
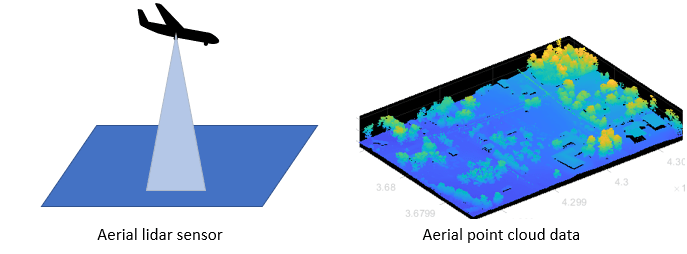
航空 LiDAR
航空 LiDAR センサーは、ヘリコプター、航空機、または UAV に取り付けられているものです。地形センサーと水深センサーで構成されます。
地形センサーは、領域の地形の監視および地図作成に役立ちます。用途には、都市計画、景観生態学、森林計画、地図作成が含まれます。
水深センサーは、水塊の深さを推定します。これらのセンサーには、水柱を通過する緑色のレーザーが追加で含まれています。用途には、海岸線管理や海洋学が含まれます。
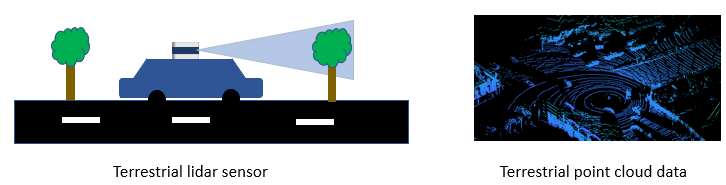
地上 LiDAR
地上 LiDAR センサーは、地球の表面または陸上のセンサーの周囲をスキャンします。静的センサーとモバイル センサーがあります。
静的センサーは、固定位置から点群を収集します。鉱業、考古学、スマートフォン、建築などの用途では、静的センサーを使用します。
モバイル センサーは、自動運転システムで最も一般的に使用され、車両に取り付けられます。その他の用途には、ロボティクス、交通計画、地図作成が含まれます。
LiDAR テクノロジーの利点
LiDAR センサーは、レーダー センサーよりも長距離かつ高解像度で正確な測定を行う必要がある場合や、環境条件やライティング条件がカメラに悪影響を及ぼす恐れがある場合に便利です。また、LiDAR スキャンはネイティブで 3 次元であるため、深さを追加するためにソフトウェアを追加する必要はありません。
LiDAR センサーを使用すると、細かい部分の検出、密な環境のスキャン、夜間や荒天時のデータ収集を、すべて高速で行うことができます。
LiDAR 処理の概要
I/O およびサポートされているハードウェア
Velodyne®、Ouster®、Hesai®、Ibeo® などの企業から提供されている多種多様な LiDAR センサーでは、さまざまな形式の点群データが使用されているため、Lidar Toolbox™ は、各種のファイル形式を使用して点群をインポートおよびエクスポートするためのツールを提供しています。現在、Lidar Toolbox では、PLY、PCAP、PCD、LAS、LAZ、および Ibeo データ コンテナー (IDC) センサー形式からのデータの読み取りをサポートしています。また、点群データを PLY、PCD、および LAS 形式に書き込むこともできます。ファイルの入力および出力の詳細については、インポート、エクスポート、可視化を参照してください。Velodyne センサーと Ouster センサーからライブ データをストリーミングすることもできます。ライブ データのストリーミングの詳細については、LiDAR データの収集とセンサー シミュレーションを参照してください。
前処理
Lidar Toolbox を使用すると、点群データのダウンサンプリング、ノイズ除去、トリミングなどの前処理操作を実行できます。点群の可視化および前処理の詳細については、Get Started with Point Cloud Analyzerを参照してください。
ラベル付け、セグメンテーション、検出
点群内でオブジェクトにラベル付けすると、オブジェクトの検出およびセグメンテーションのためにグラウンド トゥルース データを整理し、解析する際に役立ちます。LiDAR ラベル付けの詳細については、LiDAR ラベラー入門を参照してください。
LiDAR 処理の多くの用途では、深層学習アルゴリズムに依存して、点群内の対象オブジェクトをセグメント化、検出、追跡、解析します。深層学習を使用した点群処理の詳細については、深層学習を使用した点群入門を参照してください。
キャリブレーションとセンサー フュージョン
ほとんどの最新センシング システムでは、複数のセンサーからなるセンサー群を使用しています。複数のセンサーから意味のある情報を取得するには、まずこれらのセンサーのキャリブレーションを行う必要があります。"キャリブレーション" とは、回転と並進の変換によって複数のセンサーの座標系を合わせる処理です。座標系の詳細については、Coordinate Systems in Lidar Toolboxを参照してください。
Lidar Toolbox は、キャリブレーションとセンサー フュージョンのためのさまざまなツールを提供しています。多くの用途では、LiDAR センサーとカメラの両方を使用して同じシーンを取得する必要があります。正確な 3 次元シーンを作成するには、これらのセンサーのデータを、まず互いにキャリブレーションすることによって融合する必要があります。LiDAR とカメラの融合の詳細については、LiDAR カメラ キャリブレーションとはおよびGet Started with Lidar Camera Calibratorを参照してください。
ナビゲーションと地図作成
"地図作成" とは、自律システム周辺の環境のマップを作成する処理です。Lidar Toolbox 内のツールを使用すると、自己位置推定と環境地図作成の同時実行 (SLAM) が可能です。これは、システムの位置と向きを、その周囲を基準として計算し、同時にその環境の地図作成を行う処理です。詳細については、MATLAB での点群 SLAM の実装を参照してください。
LiDAR テクノロジーの用途
Lidar Toolbox は、LiDAR 処理のさまざまな用途における典型的なワークフローのためのツールを多数提供しています。
先進運転支援システム — 移動する車両に取り付けられている LiDAR センサーを使用して、自動車、トラック、その他のオブジェクトを検出できます。これらの点群のセマンティック セグメンテーションを行って、移動中のオブジェクトを検出および追跡できます。Lidar Toolbox を使用した車両の検出と追跡の詳細については、LiDAR を使用した車両の検出、分類、および追跡の例を参照してください。
リモート センシング — 航空 LiDAR センサーは、領域内の植被に関する情報を提供する点群を生成できます。Lidar Toolbox を使用したリモート センシングの詳細については、航空 LiDAR データからの個々の樹木の属性および森林のメトリクスの抽出の例を参照してください。
ナビゲーションと地図作成 — 車両に取り付けられた LiDAR センサーから生成された LiDAR データを使用してマップを作成できます。これらのマップは位置推定およびナビゲーションに使用できます。マップの作成の詳細については、Feature-Based Map Building from Lidar Dataの例を参照してください。