estimateBoardCornersLidar
Estimate corners of calibration board in lidar frame
Since R2026a. Replaces detectRectangularPlanePoints.
Syntax
Description
cornersLidar = estimateBoardCornersLidar(ptCloud,clusterThreshold,boardSize)ptCloud, a clustering distance threshold
clusterThreshold, and the board size
boardSize.
cornersLidar = estimateBoardCornersLidar(ptCloud,clusterLabels,boardSize)clusterLabels, and the board size.
[
additionally returns the detected calibration boards as point clouds.cornersLidar,boardPtCloud] = estimateBoardCornersLidar(___)
[___] = estimateBoardCornersLidar(___,
specifies options using one or more name-value arguments in addition to any combination of
arguments from previous syntaxes. For example, Name=Value)PlaneFitDistance=0.05,
sets the maximum distance to fit a plane to each cluster to 0.05.
Examples
Load point cloud data from a PCD-format file.
ptCloudFile = fullfile(toolboxdir("lidar"),"lidardata","calibration","pointClouds","01.pcd"); ptCloud = pcread(ptCloudFile);
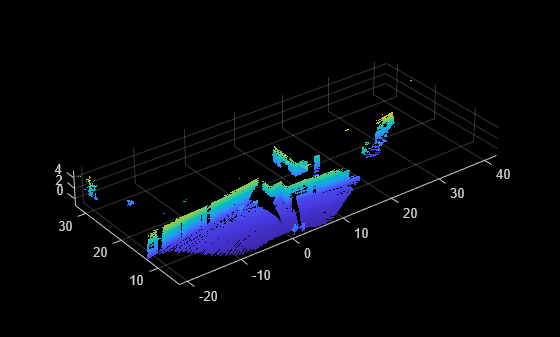
Visualize the point cloud.
figure pcshow(ptCloud)
Remove the ground from the point cloud.
[~,ptCloudNoGround] = segmentGroundSMRF(ptCloud,MaxWindowRadius=8,ElevationThreshold=0.2);
Detect the calibration board in the point cloud and estimate the board corners in the lidar frame.
clusterThreshold = 0.05; boardSize = [800 1000]; [cornersLidar,boardPtCloud] = estimateBoardCornersLidar(ptCloudNoGround,clusterThreshold,boardSize);
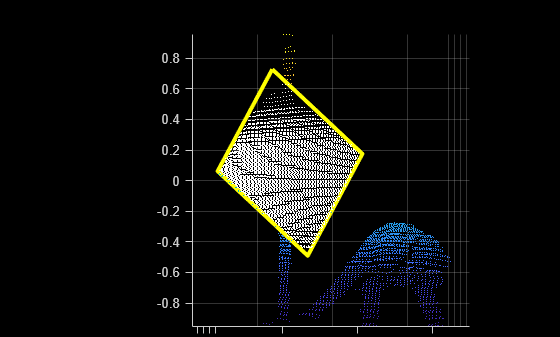
Visualize the detected calibration board in the point cloud.
figure ax = pcshow(ptCloudNoGround); hold on pcshow(boardPtCloud.Location,"white",Projection="orthographic") cornerIdx = [1 2 3 4 1]; board = plot3(cornersLidar(cornerIdx,1),cornersLidar(cornerIdx,2),cornersLidar(cornerIdx,3),Color="yellow",LineWidth=3); ax.CameraPosition = [0 0 0]; camlookat(board)
Read point cloud data from a PCD file.
ptCloudFile = fullfile(toolboxdir("lidar"),"lidardata","calibration","pointClouds","02.pcd"); ptCloud = pcread(ptCloudFile);
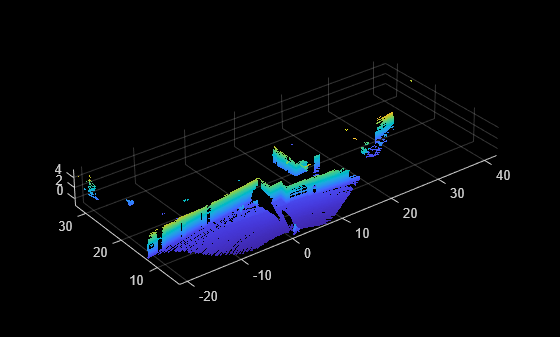
Visualize the point cloud data.
figure pcshow(ptCloud)
Select a region of interest to speed up the detection.
radius = 10; idx = findPointsInCylinder(ptCloud,radius); ptCloud = select(ptCloud,idx);
Remove the ground from the point cloud.
[~,ptCloudNoGround] = segmentGroundSMRF(ptCloud,MaxWindowRadius=8,ElevationThreshold=0.2);
Cluster the point cloud.
clusterThreshold = 0.05;
minPoints = 50;
[clusterLabels,numClusters] = pcsegdist(ptCloudNoGround,clusterThreshold,Method="exhaustive",NumClusterPoints=minPoints);Visualize the clustered point cloud.
idxValidPoints = find(clusterLabels); labelColorIdx = clusterLabels(idxValidPoints); segmentedPtCloud = select(ptCloudNoGround,idxValidPoints); figure colormap(hsv(numClusters)) pcshow(segmentedPtCloud.Location,labelColorIdx)
Detect the calibration board in the point cloud.
boardSize = [800 1000]; [cornersLidar,boardPtCloud] = estimateBoardCornersLidar(ptCloudNoGround,clusterLabels,boardSize);
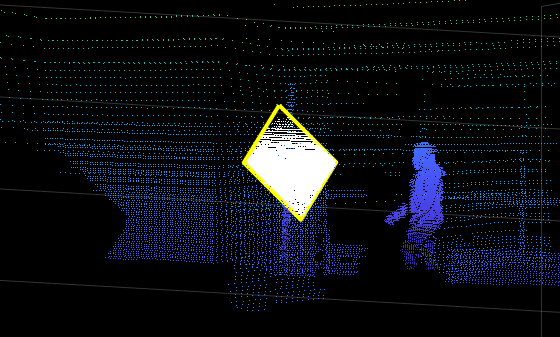
Visualize the detected calibration board.
figure ax = pcshow(ptCloudNoGround); hold on pcshow(boardPtCloud.Location,"white",Projection="orthographic") cornerIdx = [1 2 3 4 1]; board = plot3(cornersLidar(cornerIdx,1),cornersLidar(cornerIdx,2),cornersLidar(cornerIdx,3),Color="yellow",LineWidth=3); ax.CameraPosition = [0 0 0]; camlookat(board)