rsample
Random sampling of linear identified systems
Description
Examples
Estimate a third-order, discrete-time, state-space model.
load iddata2 z2; sys = n4sid(z2,3);
Randomly sample the estimated model.
N = 20; sys_array = rsample(sys,N);
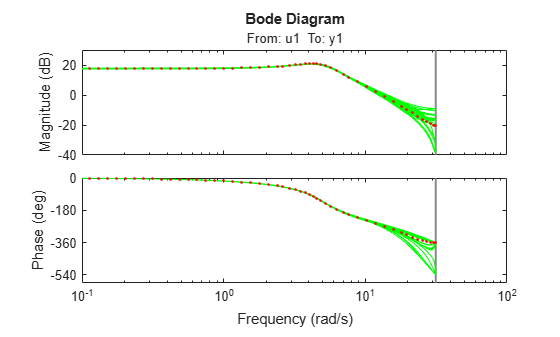
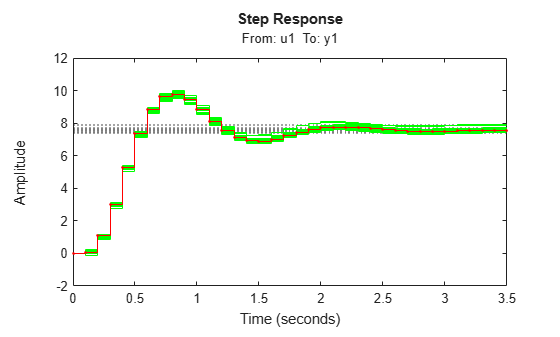
Analyze the uncertainty in time (step) and frequency (Bode) responses.
figure; bp = bodeplot(sys_array,'g',sys,'r.'); bp.PhaseMatchingEnabled = 'on';
figure; stepplot(sys_array,'g',sys,'r.-')
Estimate a third-order, discrete-time, state-space model.
load iddata2 z2; sys = n4sid(z2,3);
Randomly sample the estimated model. Specify the standard deviation level for perturbing the model parameters.
N = 20; sd = 2; sys_array = rsample(sys,N,sd);
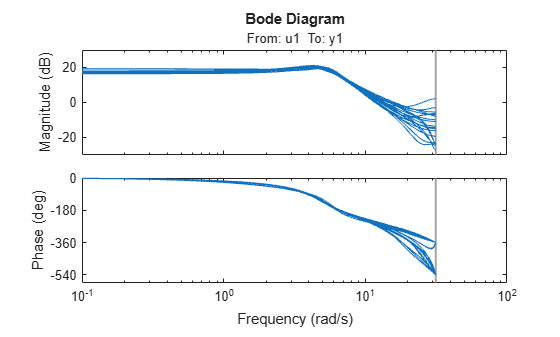
Analyze the model uncertainty.
figure; bode(sys_array);
Estimate an ARMAX model.
load iddata1 z1 sys = armax(z1,[2 2 2 1]);
Randomly sample the ARMAX model. Perturb the model parameters up to 2 standard deviations.
N = 20; sd = 2; sys_array = rsample(sys,N,sd);
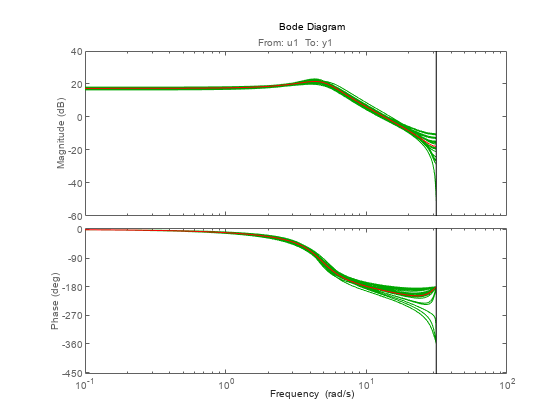
Compare the frequency response confidence region corresponding to 2 standard deviations (asymptotic estimate) with the model array response.
bp = bodeplot(sys_array,'g',sys,'r'); bp.PhaseMatchingEnabled = "on"; bp.Characteristics.ConfidenceRegion.NumberOfStandardDeviations = 2; bp.Characteristics.ConfidenceRegion.Visible = "on";
Input Arguments
Output Arguments
Tips
For systems with large parameter uncertainties, the randomized systems in
sysArraycan contain unstable elements, which can make it difficult to analyze the properties of the identified system. Using analysis commands, such asstep,bode, andsim, on such systems can produce unreliable results. Instead, use a dedicated Monte-Carlo analysis command, such assimsd.
Version History
Introduced in R2012a
See Also
simsd | init | noisecnv | noise2meas | iopzmap | bode | step | translatecov