プロセス モデルの推定
ライブ エディターで時間または周波数領域の単入力単出力 (SISO) システムの連続時間プロセス モデルを推定する
説明
[プロセス モデルの推定] タスクでは、SISO システムのプロセス モデルを対話的に推定および検証できます。モデル構造を定義および変更し、初期条件の処理や探索方法などのオプションのパラメーターを指定できます。このタスクは、ライブ スクリプト用の MATLAB® コードを自動生成します。ライブ エディター タスク全般の詳細については、ライブ スクリプトへの対話型タスクの追加を参照してください。
プロセス モデルは、線形システム ダイナミクスを記述した単純な連続時間伝達関数です。プロセス モデルの要素には、静的ゲイン、時定数、時間遅延、積分器、プロセス ゼロなどがあります。
プロセス モデルは、多くの産業でシステム ダイナミクスを記述するためによく使用されており、さまざまな量産環境に適用できます。このモデルの利点は、シンプルであること、伝達遅延の推定をサポートすること、モデル係数が極と零点として簡単に解釈できることです。プロセス モデルの推定の詳細については、What Is a Process Model?を参照してください。
[プロセス モデルの推定] タスクは、より一般的な System Identification アプリから独立しています。複数のモデル構造の推定を計算して比較する場合は、System Identification アプリを使用します。
開始するには、入出力データが含まれている実験データを MATLAB ワークスペースに読み込んでから、データをタスクにインポートします。次に、推定するモデル構造を選択します。タスクでは、さまざまなモデル構造で実験して測定に対する各モデルの出力の適合度を比較できるようにするコントロールとプロットが用意されています。
タスクを開く
MATLAB エディターでライブ スクリプトに [プロセス モデルの推定] タスクを追加するには、次を行います。
[ライブ エディター] タブで、[タスク]、[プロセス モデルの推定] を選択します。
スクリプトのコード ブロック内で、
process、estimateなどの関連するキーワードを入力します。コマンドの補完候補から[プロセス モデルの推定]を選択します。
例
[プロセス モデルの推定] ライブ エディター タスクを使用して、プロセス モデルを推定し、モデル出力を測定データと比較します。
データの設定
測定データ tt1 を MATLAB ワークスペースに読み込みます。tt1 は 1 つの入力変数 u と 1 つの出力変数 y を含む timetable です。
load sdata1 tt1
タスクへのデータのインポート
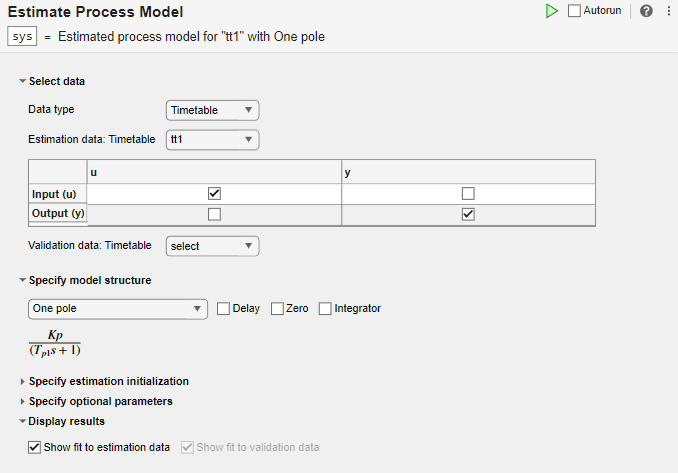
[データの選択] セクションで [データ型] を Timetable に設定し、[推定データ] を tt1 に設定します。

タスクで、tt1 の入出力変数名が含まれた表が表示されます。
既定の設定を使用したモデルの推定
モデル構造およびオプション パラメーターを調べます。
[モデル構造の指定] セクションの既定のオプションは One Pole であり、遅延も、零点も、積分器も指定されていません。このセクションのパラメーターの下にある方程式で、指定した構造が表示されます。
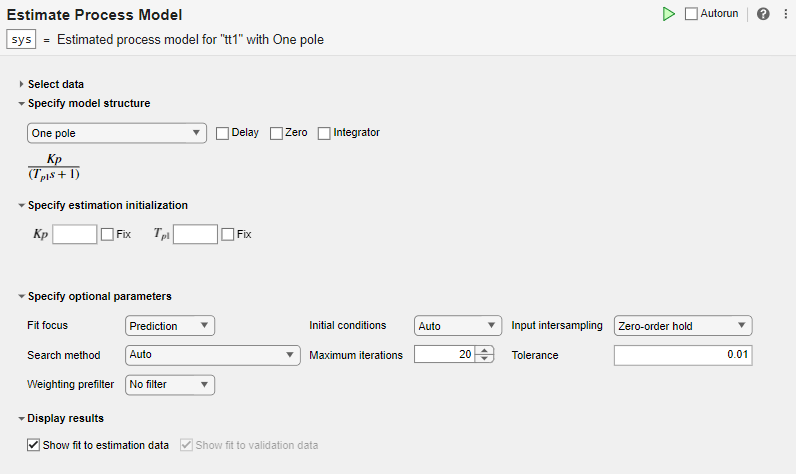
[推定の初期化の指定] セクションで、モデル構造のパラメーターに一致する初期化パラメーターにより、推定の開始点を設定できます。[固定] を選択すると、パラメーターは指定した値に固定されたままになります。この例では、初期化を指定しません。この場合、タスクでは開始点に既定値を使用します。
[オプション パラメーターの指定] セクションでは、プロセス推定の既定のオプションが設定されています。
緑の矢印をクリックして、[ライブ エディター] タブからタスクを実行します。[自動実行] を選択して、パラメーターを更新するごとにタスクを自動的に実行することもできます。
![]()
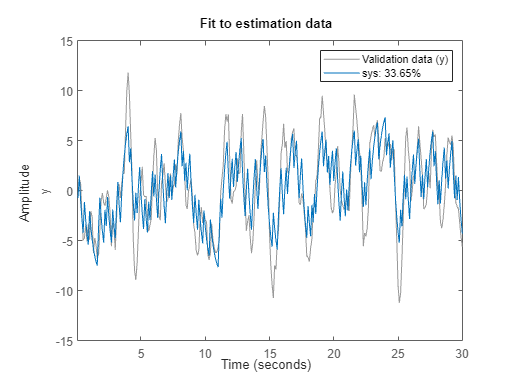
プロットで推定データ、推定モデル出力、および適合率 (%) が表示されます。
パラメーター設定の実験
パラメーター設定を実験し、適合への影響を確認します。
たとえば、One Pole 構造に遅延を追加してタスクを実行します。


推定の適合度が向上しましたが、適合率はそれでも 50% 未満です。
別のモデル構造を試します。[モデル構造の指定] で遅延を指定せずに Underdamped Pair を選択し、タスクを実行します。
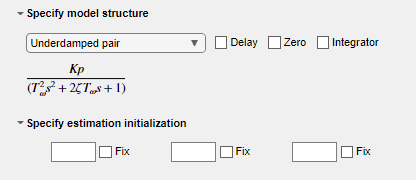
適合結果が大幅に向上します。
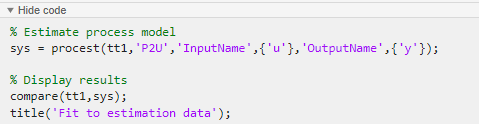
コードの生成
タスクで生成されたコードを表示するには、パラメーター セクションの下部にある ![]() をクリックします。表示されたコードには、タスクの現在のパラメーター構成が反映されています。
をクリックします。表示されたコードには、タスクの現在のパラメーター構成が反映されています。
別個の推定データと検証データを使用して、推定プロセス モデルを検証できるようにします。
データの設定
測定データ sdata1 を MATLAB ワークスペースに読み込み、その内容を調べます。
load sdata1 umat1 ymat1 Ts
データを 2 セットに分割します。半分は推定用、もう半分は検証用です。元のデータ セットには 300 個のサンプルが含まれているため、新しい各データ セットには 150 個のサンプルが含まれています。
u_est = umat1(1:150); u_val = umat1(151:300); y_est = ymat1(1:150); y_val = ymat1(151:300); Ts
Ts = 0.1000
タスクへのデータのインポート
[データの選択] セクションで、[データ型] を [数値] に設定します。サンプル時間を 0.1 秒に設定します。推定と検証に適切なデータ セットを選択します。

モデルの推定と検証
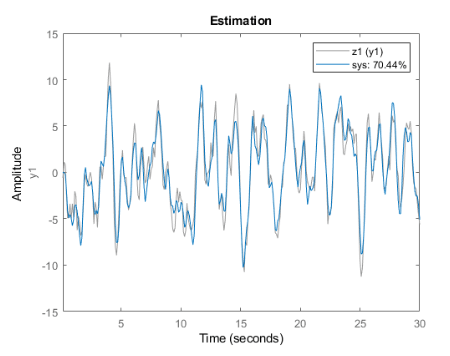
ライブ エディター タスクでのプロセス モデルの推定の例では、モデル構造 Underdamped Pair を使用して最良の結果を得ています。この例でも同じオプションを選択します。

タスクを実行します。タスクを実行すると 2 つのプロットが作成されます。最初のプロットには推定結果が表示され、2 番目のプロットには検証結果が表示されます。

推定データへの適合はライブ エディター タスクでのプロセス モデルの推定より若干悪くなっています。現在の例の推定では、モデルの推定に使用しているデータが半分だけです。検証データへの適合は、より一般的にモデルの良好さを表します。この検証データへの適合が、推定データへの適合より良い結果になっています。