線形グレー ボックス モデル
システムの物理特性を理解していて、不明なパラメーターを含む常微分方程式または差分方程式 (ODE) を使用してシステムを表現できる場合は、System Identification Toolbox™ のコマンドを使用してグレーボックス モデリングを実行できます。"グレーボックス モデル" の ODE では、パラメーター間の結合を含むモデルの数学的構造を明示的に指定します。変数間の関係、モデルの動作に対する制約、またはシステム ダイナミクスを表す明示的な方程式がわかっている場合はグレーボックス モデリングが便利です。
線形グレーボックス モデルは idgrey オブジェクトを使用して表現できます。線形ダイナミクスを状態空間形式で記述するための関数を記述する必要があります。詳細については、線形グレーボックス モデルの推定を参照してください。
関数
トピック
- Linear and Nonlinear Grey-Box Modeling
If you understand the physics of your system, you can estimate linear or nonlinear grey-box models.
- Identifying State-Space Models with Separate Process and Measurement Noise Descriptions
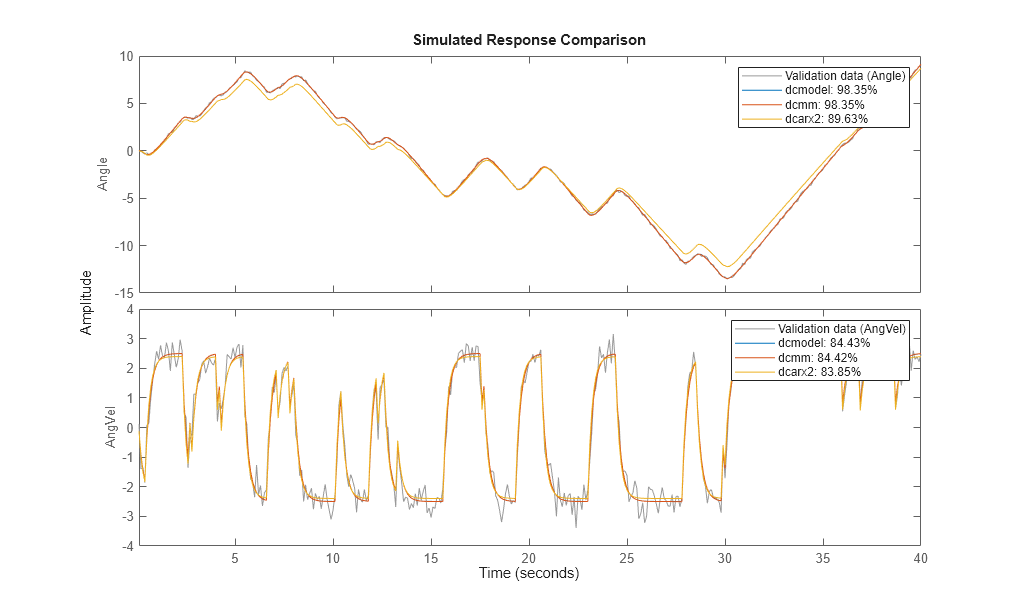
An identified linear model is used to simulate and predict system outputs for given input and noise signals.
- 線形グレーボックス モデルの推定
コマンド ラインで線形グレーボックス モデルを定義および推定する方法。
- Estimate Continuous-Time Grey-Box Model for Heat Diffusion
This example shows how to estimate the heat conductivity and the heat-transfer coefficient of a continuous-time grey-box model for a heated-rod system.
- Estimate Discrete-Time Grey-Box Model with Parameterized Disturbance
This example shows how to create a single-input and single-output grey-box model structure when you know the variance of the measurement noise.
- Estimate State-Space Models with Structured Parameterization
Structured parameterization lets you exclude specific parameters from estimation by setting these parameters to specific values.
- Estimate Coefficients of ODEs to Fit Given Solution
Estimate model parameters using linear and nonlinear grey-box modeling.
- Estimate Model Using Zero/Pole/Gain Parameters
This example shows how to estimate a model that is parameterized by poles, zeros, and gains.
注目の例
System Identification Toolbox を使用した構造化されたユーザー定義モデルの構築
この例では、ユーザー定義モデル構造でパラメーターを推定する方法を説明します。