このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
USB イーサネット AXI マネージャー
ユニバーサル シリアル バス (USB) インターフェイス経由でイーサネットを使用して、MATLAB® または Simulink® からオンボード メモリの場所にアクセスします。USB イーサネット インターフェイス経由で AXI マネージャーを実行するには、次の手順に従ってください。
メモ
AXI マネージャーは、Xilinx® Zynq® デバイスの USB イーサネット インターフェイスのみをサポートします。
ハードウェア ボードのセットアップ
ハードウェア ボードと互換性のあるセキュア デジタル (SD) カード イメージ ファイルを SD カード ドライブ パスにコピーします。この手順を実行するには、Hardware Setup ツールまたは
copyImageToHostSDCardPathまたはloadImageToTargetSDCardPath関数を使用できます。ハードウェア ボード上のジャンパーを設定して、USB インターフェイスを周辺機器モードで構成します。
ホストコンピュータとターゲットボードの間に USB ケーブルを接続します。
ホスト コンピューターのセットアップ
Windows® のみ — USB イーサネット ドライバーをインストールします。
SD カードがハードウェア ボード上で起動された後、ホスト コンピューターで USB イーサネットまたは RNDIS ガジェットの IP アドレスを構成します。
AXI マネージャーの読み取りおよび書き込み操作を実行する
loadBitstream関数を使用して、FPGA 設計に基づいて BIT および DTB ファイルをロードします。aximanagerオブジェクトを作成します。Interfaceプロパティを'USBEthernet'として指定します。書き込みおよび読み取り操作を実行します。
セットアップ手順は Hardware Setup ツールで自動化されています。ガイド付きハードウェアセットアップを参照してください。
完全なハードウェアチェックリスト
ハードウェアのセットアップを完了するために必要なハードウェアとアクセサリがすべて揃っていることを確認します。
USB 3.0 または USB 2.0 ケーブル - ハードウェア ボードがサポートする USB ケーブルの種類に応じて、USB 3.0 または USB 2.0 ケーブルを使用します。この接続は、プログラミング ファイルなどのデータをホスト コンピューターからハードウェア ボードに送信するために必要です。ハードウェアとの間で信号を送受信するためにも必要です。
メモ
USB 3.0 をサポートするボードに USB 2.0 ケーブルを使用すると、ケーブルのデータ スループットが低下します。
SD カード リーダーと 4 GB 以上の容量を持つ書き込み可能な SD カード - ホスト マシンにカード リーダーが内蔵されていない場合は、外付け USB SD カード リーダーを使用します。
サポートされているハードウェア – サポートされているハードウェア ボードが必要です。サポートされているボードとインターフェースのリストについては、FPGA検証でサポートされているFPGAデバイス を参照してください。後の手順でプロンプトが表示されるまで、デバイスを接続したり電源を入れたりしないでください。
電源アダプタ - このケーブルはハードウェアをホストに接続します。
ホストコンピュータのSDカードにイメージをコピーする
ハードウェア ボードと互換性のある SD カード イメージ ファイルを SD カード ドライブ パスにコピーします。この SD カード イメージはサポート パッケージに含まれています。イメージには、ハードウェア ボードを I/O 周辺機器として使用するために必要な組み込みソフトウェアと FPGA プログラミング ファイルが含まれています。必要なイメージが入った SD カードをすでにコピーしている場合は、この手順をスキップしてください。
4 GB 以上の SD カードをホスト コンピューターのカード リーダーに挿入します。カードは FAT32 形式である必要があります。

メモ
ファームウェア イメージをカードにダウンロードする前に、SD カードのロックを解除します。カードがボードカードリーダー内にある間は、カードをロック解除したままにしてください。
copyImageToHostSDCardPath関数を使用して、ボード固有の SD カード イメージ ファイルをホスト コンピューターの指定された SD カード ドライブの場所にコピーします。SD カードのイメージ ファイルには、ブートローダーとサポートされているオペレーティング システムの情報が含まれています。この関数は、ターゲット ハードウェア ボード上の AXI マネージャー ホスト コマンドを処理するためのサーバー デーモンもコピーします。Hardware Setup ツールを使用してハードウェア ボードをセットアップする場合、この手順は自動化されます。ドライブを選択してファームウェアをロードするを参照してください。
この例では、ZCU102 ボードのホスト コンピューター上の
G:ドライブの場所にデフォルトの SD カード イメージをコピーします。ハードウェア ボード上の USB イーサネット ガジェットの IP アドレスを、ドット区切りの 4 桁の形式で指定し、その後にusb0/を付けます。この例では、ZCU102 ボード上の USB イーサネット ガジェットの IP アドレスを 192.168.3.2 に設定します。copyImageToHostSDCardPath('ZCU102','G:', ... 'DeviceAddress','usb0/192.168.3.2');
ハードウェア ボードの SD カード イメージを更新する (オプション)
ホストコンピュータのSDカードにイメージをコピーする のプロセスを使用して SD カードのイメージ ファイルをすでにコピーしている場合は、この手順をスキップしてください。
loadImageToTargetSDCardPath 関数を使用して、ハードウェア ボード上の SD カード イメージを更新します。この手順を続行する前に、SD カードがターゲット ハードウェア ボードの SD カードの場所に挿入されていること、およびホスト コンピューターとターゲット ハードウェア ボードの間にイーサネット接続が確立されていることを確認してください。この機能は、処理システム (PS) イーサネット接続を使用して SD カードのイメージ ファイルを読み込みます。
loadImageToTargetSDCardPath 関数は、ハードウェア ボード上の既存のボード固有の SD カード イメージ ファイルを更新します。SD カードが更新されるまで、少なくとも 20 秒待つ必要がある場合があります。
この例では、デフォルトの PS Ethernet IP アドレス 192.168.0.2 を持つ ZCU102 ボードのターゲット ハードウェア ボードの SD カードの場所にデフォルトの SD カード イメージをコピーします。ハードウェア ボード上の USB イーサネット ガジェットの IP アドレスを、ドット区切りの 4 桁の形式で指定し、その後に usb0/ を付けます。この例では、ZCU102 ボード上の USB イーサネット ガジェットの IP アドレスを 192.168.3.2 に設定します。
loadImageToTargetSDCardPath('ZCU102', ... 'DeviceAddress','usb0/192.168.3.2');
この例では、PS Ethernet IP アドレス 192.168.5.2 を持つ ZCU102 ボードのデフォルトの SD カード イメージをターゲット ハードウェア ボードの SD カードの場所にコピーします。この例では、ハードウェア ボード上の USB イーサネット ガジェットの IP アドレスを 192.168.3.2 に設定します。
loadImageToTargetSDCardPath('ZCU102', ... 'DeviceAddress',{'192.168.5.2','usb0/192.168.3.2'});
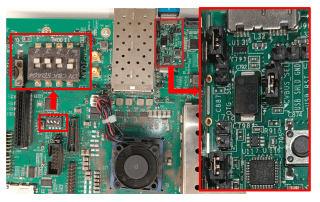
ジャンパースイッチの設定
ハードウェア ボード上のジャンパーを設定して、USB ケーブルを周辺機器モードで構成します。ボードの電源がオフになっていることを確認してください。ジャンパー設定はボードごとに異なります。設定の詳細については、ボードのドキュメントを参照してください。
たとえば、ZCU102 ボードの場合は次のジャンパー設定を設定します。
ZCU102のジャンパーを設定する
SW6 およびその他のジャンパーをこの表の値に設定します。SW6 ジャンパー設定により、ボードが SD カードから起動するようになります。
| SW6 スイッチ | SW6 スイッチ位置 |
|---|---|
| 1 | 上 |
| 2 | 下 |
| 3 | 下 |
| 4 | 下 |
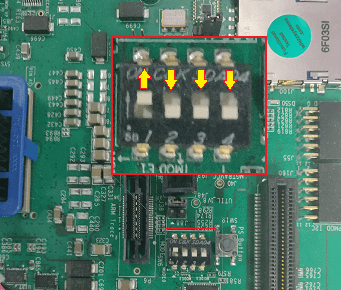
J7、J113、J110、J109 ジャンパーをこの表の値に設定します。これらの設定により、ハードウェア ボードが USB イーサネット インターフェイスを介してホスト コンピューターと通信できるようになります。
| ジャンパー | ジャンパーポジション |
|---|---|
| J7 | オフ |
| J113 | 1-2 |
| J110 | 1-2 |
| J109 | ジャンパーなし |
サポートされている他のボードのジャンパー設定については、ジャンパーを設定する を参照してください。
ホストコンピュータでUSBを構成する
ホスト コンピューターをハードウェア ボードと通信できるように構成する必要があります。ターゲット ハードウェア ボードで SD カードを起動すると、ボードはホスト コンピューター上で MathWorks® USB Ethernet または RNDIS ガジェットとして表示されます。
Hardware Setup ツールを使用する場合は、ハードウェア ボードに接続する USB イーサネットまたは RNDIS ガジェットを選択します。ホストコンピュータでUSBを構成するを参照してください。USB イーサネット ガジェットをすでに構成している場合は、この手順をスキップしてください。
メモ
ガイド付きセットアップは、Windows オペレーティング システム上の USB 構成のみをサポートします。Linux® オペレーティング システムの場合、USB イーサネット ガジェットを手動で構成する必要があります。
デフォルトでは、ホスト コンピュータ上の RNDIS ガジェットは、ハードウェア ボード上で実行されている動的ホスト構成プロトコル (DHCP) サービスから IP アドレスを取得します。ホスト コンピューターを手動で構成するには、特定のオペレーティング システムの手順に従います。
Windows を設定する
Windows 7 以降の場合は、次の手順に従ってください。
Start メニューから、Control Panel をクリックします。
View by を
Categoryに設定します。Network and Internetをクリックします。
Network and Sharing Centerをクリックします。
左側のペインで、Change adapter settings をクリックします。
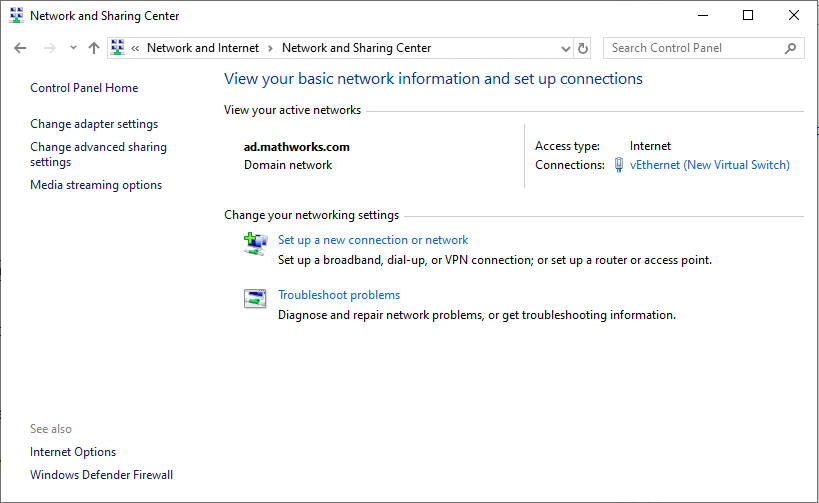
ハードウェア ボードに接続されている USB イーサネット接続を右クリックし、Properties を選択します。
[プロパティ] ダイアログ ボックスの [Networking] タブで、[Internet Protocol Version 4 (TCP/IPv4)] 以外のすべてのオプションをオフにします。その他のサービス、特にウイルス対策ソフトウェアは、ハードウェア ボードとの断続的な接続の問題を引き起こす可能性があります。
Internet Protocol Version 4 (TCP/IPv4)をダブルクリックします。
General タブで、Use the following IP address を選択します。
ハードウェア ボードのデフォルトの IP アドレスは
192.168.1.2です。ホスト ネットワーク接続は、ハードウェア ボードと同じサブネット上にある必要があります。この要件を満たすには、互換性のある IP アドレスをホスト ネットワーク接続に割り当てる必要があります。ホスト ネットワーク IP アドレスを 192.168.1.xに設定します。ここで、xは 1 または [3, 255] の範囲の整数です。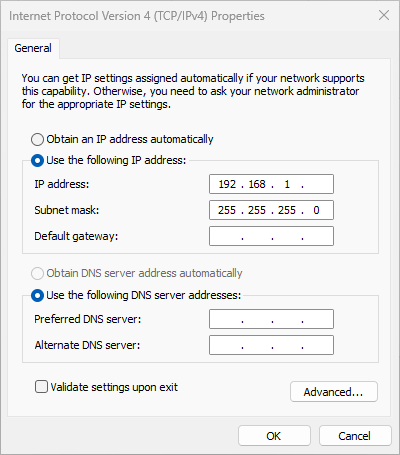
IP アドレス フィールドの最初の 3 オクテットが 192.168.1 でない場合、ハードウェア ボードは別のサブネット上にあります。IP アドレスに同じサブネット番号を入力します。
サブネット マスクはデフォルト値の
255.255.255.0のままにしておきます。[OK] をクリックします。
Linux を設定する
ホスト USB イーサネット インターフェイスに静的 IP アドレスを設定します。この構成により、ハードウェア ボードとの通信が可能になります。ハードウェア ボードのデフォルトの IP アドレスは 192.168.1.2 です。ホスト ネットワーク接続は、ハードウェア ボードと同じサブネット上にある必要があります。この要件を満たすには、ホスト ネットワーク接続に互換性のある IP アドレスを割り当てる必要があります。
ホスト ネットワーク IP アドレスを 192.168.1.
xに設定します。ここで、xは 1 または [3, 255] の範囲の整数です。この値は、ifconfigコマンドを使用して設定します。たとえば、シェルにこのコマンドを入力します。% sudo ifconfig usbZ 192.168.1.4 netmask 255.255.255.0
この構文では、
usbはホスト USB ポートの名前です (通常は usb0、usb1 など)。Zsudoコマンドを使用するには、パスワードを入力する必要がある場合があります。シェルにこのコマンドを入力して変更を確認します。
% ifconfig usbZ
usbは、前の手順で設定したホスト USB ポートの名前です。Z
ビットストリームファイルをハードウェアボードにロードする
loadBitstream 関数は、ターゲット ハードウェア ボードにロードする新しい FPGA デザインがある場合にのみ使用してください。それ以外の場合は、この手順をスキップしてください。
この関数は、カスタム FPGA ビットストリーム ファイルとそれに対応するデバイス ツリー BLOB (DTB) ファイルをターゲット ハードウェア ボードにロードします。ターゲット ハードウェア ボードに変更が反映されるまで、少なくとも 20 秒待つ必要がある場合があります。
この例では、カスタム FPGA ビットストリームとそれに対応する DTB ファイルを、デフォルト値とは異なる USB イーサネット IP アドレスを持つ ZCU102 ボードにロードします。
loadBitstream('ZCU102','design.bit', ... 'devicetree.dtb', ... 'DeviceAddress','192.168.3.2');
プログラムがハードウェア ボード上で実行されているときは、ボードと通信できます。
MATLAB からボードにアクセスするには、aximanager オブジェクトを作成し、readmemory および writememory オブジェクト関数を使用して、ボード上のメモリマップされた場所を読み書きします。
Simulink からボードにアクセスするには、Simulink モデルを作成し、それに AXI Manager Write と AXI Manager Read を含めます。ボード上のメモリマップされた場所を読み書きするようにブロックを構成します。詳細については、Simulink を使用して FPGA の場所にアクセスするを参照してください。