このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
patternsearch と Optimize ライブエディタータスクを使用した制約付き最小化
この例では、視覚的なアプローチを提供する 最適化ライブ エディター タスクとコマンド ラインの両方を使用して、制約付き最小化問題を解決する方法を示します。
問題の説明
この問題では、patternsearch を使用して非線形関数を最小化するときに、線形制約と非線形制約を使用します。目的関数は次のとおりです。
ここで、
H = [36 17 19 12 8 15;
17 33 18 11 7 14;
19 18 43 13 8 16;
12 11 13 18 6 11;
8 7 8 6 9 8;
15 14 16 11 8 29];
f = [ 20 15 21 18 29 24 ]';
F = @(x)0.5*x'*H*x + f'*x;
線形制約は
ここで、
A = [-8 7 3 -4 9 0];
b = 7;
Aeq = [7 1 8 3 3 3;
5 0 -5 1 -5 8;
-2 -6 7 1 1 9;
1 -1 2 -2 3 -3];
beq = [84 62 65 1]';続行する前に、前述のコード セクションを入力して、問題の変数をワークスペースに取得します。
最適化ライブエディタータスクでpatternsearchを使用して解決する
[ホーム] タブの [ファイル] セクションで [新規ライブ スクリプト] ボタンをクリックして、新しいライブ スクリプトを作成します。
最適化ライブ エディター タスクを挿入します。[挿入] タブをクリックしてから、[コード] セクションで、[タスク]、[最適化] を選択します。
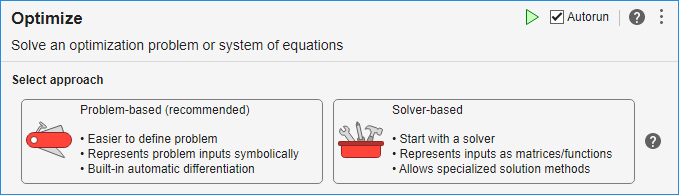
この例の場合は、ソルバーベースのタスクを選択します。
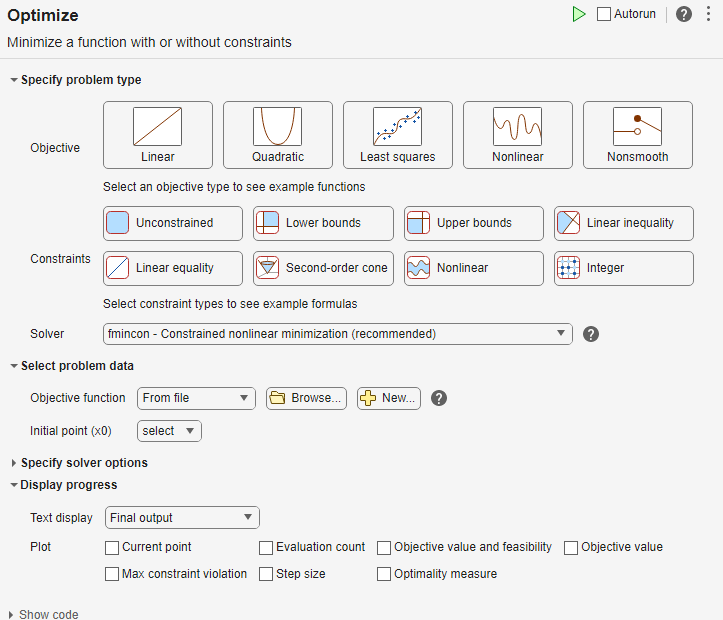
問題の種類の指定
タスクの 問題の種類の指定 セクションで、目的> 非線形 ボタンをクリックします。
[制約] > [線形不等式] ボタンと [線形等式] ボタンをクリックします。
Solver > patternsearch - パターン探索を選択します。
問題データの選択
タスクの 問題のデータの選択 セクションに問題の変数を入力します。目的関数を指定するには、[目的関数] > [関数ハンドル] を選択し、F を選択します。
不等式制約を
Aとbに設定します。等式制約をAeqとbeqに設定します。初期点を設定するには、まずタスクの上に新しいセクションを作成する必要があります。これを行うには、[Insert] タブの [セクション区切り] ボタンをクリックします。タスクの上の新しいセクションに、初期点の次のコードを入力します。
x0 = [2 1 0 9 1 0]';
セクションを実行して、
x0をワークスペースに配置します。セクションを実行するには、セクション内にカーソルを置いて Ctrl+Enter を押すか、行番号の左側にある青い縞模様のバーをクリックします。タスクの 問題のデータの選択 セクションで、
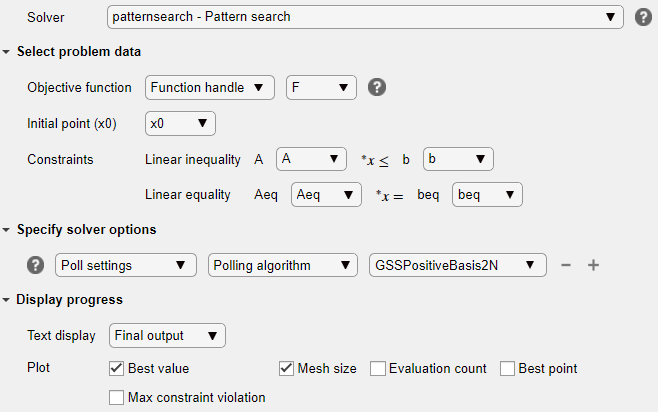
x0を初期点として設定します。ソルバー オプションの指定
この問題は線形制約されているため、追加のソルバー オプションを指定します。タスクの ソルバー オプションの指定 セクションを展開し、 追加 ボタンをクリックします。Poll settings > Poll method を
GSSPositiveBasis2Nに設定します。線形制約問題に対する GSS ポーリング方法の効率の詳細については、patternsearch を用いた大域的最小値の探索 を参照してください。表示オプションを設定する
タスクの 進行状況の表示 セクションで、最良値 および メッシュ サイズ プロット関数を選択します。
設定は次のようになります。
ソルバーの実行と結果の検証
ソルバーを実行するには、タスク ウィンドウの右上にあるオプション ボタン [⁝] をクリックして、[セクションの実行] を選択します。

プロットは別の図ウィンドウとタスク出力領域に表示されます。
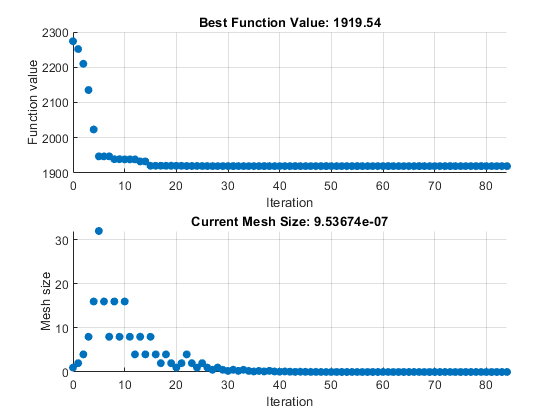
解点と解における目的関数の値を取得するには、タスクの上部を確認します。

Optimizeライブ エディター タスクは、ソリューションをsolutionという名前の変数に返し、目的関数の値をobjectiveValueという名前の変数に返します。これらの値を表示するには、タスクの下のセクションに次のコードを入力してセクションを実行するか、MATLAB® コマンド ラインでコードを入力します。disp(solution)
8.5165 -6.1094 4.0989 1.2877 -4.2348 2.1812disp(objectiveValue)
1.9195e+03
非線形制約を含める
次の非線形制約を問題に追加します。
これらの制約を含めるには、まず 制約 > 非線形 ボタンをクリックします。

問題のデータの選択 セクションの [制約] の下で、[非線形] > [ローカル関数] を選択し、[新規] ボタンをクリックします。タスクの下側の新しいセクションに関数が表示されます。結果のコードに次の行を含めるように編集します。
function [c, ceq] = double_ineq(x) c = [-1.5 + x(1)*x(2) + x(1) - x(2); -x(1)*x(2) - 10]; ceq = []; end
非線形 制約セクションで、double_ineq を選択します。
非線形制約アルゴリズムにより、
patternsearchは多くの関数評価を実行します。ソルバー オプションの指定 セクションで、現在のオプションの右側にあるプラス記号をクリックすると、追加のオプションが表示されます。次に、関数評価の上限を 5e4 に増やします。
タスクを再度実行して最適化を再実行します。
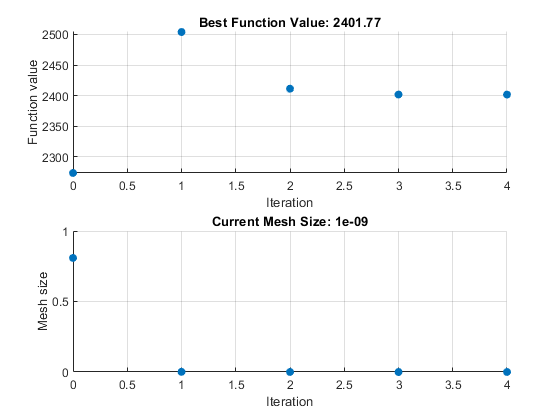
ソリューションと目的関数の値を表示します。
disp(solution)
7.2083 -1.3873 4.9579 -3.1393 -3.1843 4.7457disp(objectiveValue)
2.4018e+03
目的関数の値は、非線形制約のない問題の値よりも高くなります。以前のソリューションは、非線形制約に関しては実行可能ではありません。
非線形制約アルゴリズムによって patternsearch アルゴリズムが変更され、修正された問題を解決するために別の外側のループが含まれるようになったため、プロットには以前よりも反復回数が大幅に少なくなっていることが示されています。外側のループは、各主要な反復処理で問題に対する変更を削減します。この場合、アルゴリズムは外側の反復を 4 回だけ実行します。アルゴリズムの詳細については、パターン探索のための非線形制約ソルバーアルゴリズムを参照してください。
コマンドラインでpatternsearchを使用して解決する
元の問題 (線形制約のみ) をコマンド ラインで解くには、次のコードを実行します。
x0 = [2 1 0 9 1 0]'; options = optimoptions('patternsearch',... 'PollMethod','GSSPositiveBasis2N',... 'PlotFcn',{'psplotbestf','psplotmeshsize'}); lb = []; ub = []; nonlcon = []; [x,fval] = patternsearch(F,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)
Optimization terminated: mesh size less than options.MeshTolerance.
x =
8.5165
-6.1094
4.0989
1.2877
-4.2348
2.1812
fval =
1.9195e+03patternsearch は、最適化ライブ エディター タスクの例に示されている最初のプロットのペアを生成します。
非線形制約を含めるには、次のコードを MATLAB パスの double_ineq.m という名前のファイルに保存します。
function [c, ceq] = double_ineq(x) c = [-1.5 + x(1)*x(2) + x(1) - x(2); -x(1)*x(2) - 10]; ceq = []; end
非線形制約付きでソルバーが完了するまで実行できるようにするには、関数評価の許可回数を増やします。
options.MaxFunctionEvaluations = 5e4;
非線形制約を含む問題を解きます。
nonlcon = @double_ineq; [x,fval] = patternsearch(F,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)
Optimization terminated: mesh size less than options.MeshTolerance
and constraint violation is less than options.ConstraintTolerance.
x =
7.2083
-1.3873
4.9579
-3.1393
-3.1843
4.7457
fval =
2.4018e+03patternsearch は、最適化ライブ エディター タスクの例に示されている 2 番目のプロット ペアも生成します。
最適化ライブ エディター タスクとコマンド ラインの両方を使用して問題を定式化して解決することができ、同じ結果が得られます。コマンドラインはより合理化されていますが、ソルバーの選択、問題の設定、プロット関数などのオプションの選択に関するヘルプは少なくなります。また、Optimize を使用して問題を開始し、[最適化] ライブ エディター タスクまたはソルバーを使用した制約付き非線形問題 のように、コマンド ラインで使用するためのコードを生成することもできます。