センサー モデル
以下を含むさまざまなセンサーをモデル化します。IMU (加速度計、ジャイロスコープ、磁力計)、GPS 受信機、高度計、レーダー、LiDAR、ソナー、IR。センサー モデルのパラメーターを変更することで、環境、チャネル、およびセンサーの構成を再現できます。アクティブ センサーの場合は、対応するエミッターとチャネルを別個のオブジェクトとしてモデル化することもできます。
関数
ブロック
| Fusion Radar Sensor | Generate radar sensor detections and tracks (R2022b 以降) |
| GPS | ノイズのある GPS センサー読み取りのシミュレーション (R2021b 以降) |
| IMU | IMU simulation model |
| INS | INS センサーのシミュレーション |
トピック
- Introduction to Statistical Radar Models for Object Tracking
In a tracking system, sensors are used to generate measurements or detections from targets in an environment.
- Simulate Radar Detections
Simulate target detections by radar sensors.
- Model IMU, GPS, and INS/GPS
Model combinations of inertial sensors and GPS.
- IMU 測定のシミュレーションの概要
この例では、
imuSensorSystem object™ を使用して慣性計測ユニット (IMU) 測定をシミュレートする方法を示します。 - 角速度測定からのバイアスの削除
この例では、
imufilterを使用して IMU からジャイロスコープのバイアスを削除する方法を説明します。
注目の例
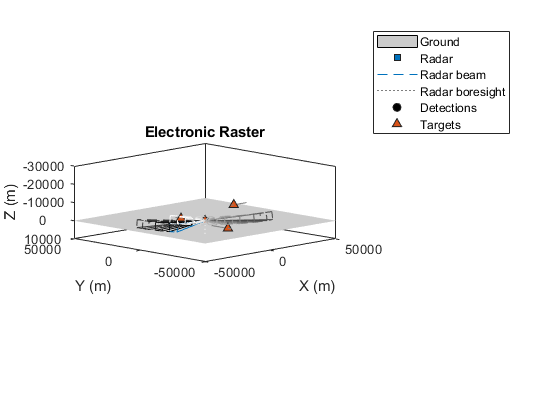
Scanning Radar Mode Configuration
Model different radar scan modes using the fusionRadarSensor. This example shows how to configure the fusionRadarSensor for several commonly used radar scan modes. With this model, you can simulate radars which mechanically scan, electronically scan, and which use both mechanical and electronic scanning. The scan limits in azimuth and elevation are configurable for both mechanical and electronic scan modes.

Generate Off-Centered IMU Readings
Generate inertial measurement unit (IMU) readings from a sensor that is mounted on a ground vehicle. Depending on the location of the sensor, the IMU accelerations are different.

Generate IMU Readings on a Double Pendulum
Generate inertial measurement unit (IMU) readings from two IMU sensors mounted on the links of a double pendulum. The double pendulum is modeled using Simscape™ Multibody™. For a step-by-step example of building a simple pendulum using Simscape Multibody, see 単純な振子のモデル化 (Simscape Multibody).