外部コード ベースにエクスポートするコンポーネント ソース コードの生成
Embedded Coder® ソフトウェアを使用している場合は、モデリング コンポーネントから関数のソース コードを生成して、外部コード ベースで使用できます。生成されるコードには、スケジューリング コード (ステップ関数など) のサポートは含まれません。Simulink® 環境外のロジックを制御するには、生成された関数コードを呼び出します。
モデリング オプション
以下のモデリング コンポーネント用にエクスポートする関数コードを生成できます。
エクスポート関数モデル (エクスポート関数モデルの概要で説明されている、Function-Call Subsystem、関数呼び出しの Model ブロック、またはその他のエクスポート関数モデルで排他的に構成される機能ブロックを含むモデル)
エクスポート関数サブシステム (Function-Call Subsystem を含むバーチャル サブシステム)
これらのモデリング コンポーネント用にコード ジェネレーターで生成されたコードをエクスポートするには、モデリング コンポーネントが特定の要件を満たしていなければなりません。
要件
モデル ソルバーは、固定ステップ離散ソルバーでなければなりません。
Function-Call Subsystem をトリガーする各ルートレベルの Inport ブロックを構成して、関数呼び出しトリガーが出力されるように構成しなければなりません。これらの Inport ブロックは Asynchronous Task Specification ブロックに接続できません。
モデルまたはサブシステムには、ルート レベルの次のブロックのみ含まれなければなりません。
Function-Call ブロック (ソルバー モデルのコンフィギュレーション パラメーター [タスクとサンプル時間オプション] 、 [周期的なサンプル時間の制約] が
[サンプル時間に依存しない]に設定されている場合のルート レベルの Function-Call Subsystem、Simulink Function、S-Function および Function-Call Model ブロックなど)Inport ブロックと Outport ブロック (端子)
Constant ブロック (Add など定数に解決されるブロックを含む)
サンプル時間が Inf のブロック
Merge ブロックおよび Data Store Memory ブロック
バーチャル接続ブロック (Function-Call Split、Mux、Demux、Bus Creator、Bus Selector、Signal Specification、およびこれらのブロックを含むバーチャル サブシステム)
Scope ブロックなどの信号ビューアー ブロック (エクスポート関数サブシステムのみ)
Constant ブロックがモデルまたはサブシステムの最上位に表示されている場合は、モデルまたは含まれているモデルのモデル コンフィギュレーション パラメーター [最適化] 、 [既定のパラメーター動作] を
[インライン]に設定しなければなりません。モデルまたはサブシステム内のブロックはコード生成をサポートしなければなりません。
絶対時間または経過時間を使用するブロックは、対応する関数呼び出しのルートレベル Inport ブロックで指定された離散サンプル時間をもつ周期的な Function-Call Subsystem の内部になければなりません。絶対時間または経過時間を使用するエクスポート関数を参照してください。
エクスポート システム境界を越えるデータ信号はバーチャル バスにできず、Goto-From 接続として実装できません。エクスポート境界を越えるデータ信号は、スカラー、多重化または非バーチャル バスでなければなりません。
さらに、エクスポート関数モデルの場合は、エクスポート関数モデルの複数のインスタンスを含むレートベース モデルのコードは生成できません。たとえば、シミュレーション中に再利用可能なエクスポート関数モデルのスケジュールに使用するテスト ハーネス モデルのコードは生成できません。
エクスポート関数サブシステムの場合、以下の要件が追加適用されます。
エクスポート関数サブシステムの境界を越えるトリガー信号はスカラーでなければなりません。トリガーとして機能しない入力および出力データ信号はスカラーである必要はありません。
定数信号がエクスポート関数サブシステムの出力端子を駆動する場合、信号でストレージ クラスを指定しなければなりません。
絶対時間または経過時間を使用するエクスポート関数
絶対時間または経過時間を使用するブロックをもつモデリング コンポーネントの関数コードをエクスポートする場合、それらのブロックは次の Function-Call Subsystem 内になければなりません。
周期的な実行用に構成している
離散サンプル時間でルートレベルの Inport ブロックを構成している
周期的な実行用に Function-Call Subsystem を構成するには、次を行います。
Function-Call Subsystem で Trigger ブロックを右クリックし、続いて [ブロック パラメーター] ボタン
 をクリックします。
をクリックします。パラメーター [サンプル時間タイプ] を
[周期的]に設定します。[サンプル時間] を関数呼び出しイニシエーターで (直接または継承により) 指定された同じ粒度に設定します。
[OK] または [適用] をクリックします。
詳細については、Timer Representation and Computationを参照してください。
関数呼び出しサブシステムの制限
Subsystem ブロックのパラメーターは、生成コードを含むファイルの名前を制御しません。ファイル名は、エクスポートされたサブシステムの名前から始まります。
Subsystem ブロックのパラメーターは、生成コードの最上位関数の名前を制御しません。各関数名には、関数をトリガーする信号の名前が反映されるか、(名前の付いていない信号の場合) 信号の発生元となるブロックが反映されます。
C++ クラスのコード インターフェイスのパッケージ化用の関数呼び出しシステムは、その関数の仕様が [既定の step メソッド] に設定されている場合に限りエクスポートできます。Interactively Configure C++ Interfaceを参照してください。エクスポート関数は、シングルスレッド実行と互換しません。共有信号の潜在的なデータ レース状況を回避するには、クラスのすべてのメンバーを同じ実行スレッドから呼び出します。
コード ジェネレーターは、その関数呼び出しイニシエーターがアクセラレータ モードで非インライン化されている場合に限り、SIL ブロックまたは PIL ブロックをアクセラレータ モードでサポートします。非インライン化イニシエーターの例として、Stateflow® チャートがあります。
レベル 2 の S-Function イニシエーター ブロック (Stateflow チャートまたは組み込みの Function-Call Generator ブロックなど) は SIL ブロックを駆動しなければなりません。
非同期 (サンプル時間) function-call system をエクスポートできますが、ソフトウェアは、非同期システムの SIL ブロックまたは PIL ブロックをサポートしません。
エクスポート関数サブシステムにおいて、TLC 関数
LibIsFirstInitの使用は削除されました。
ワークフロー
エクスポートされた関数用のコードを生成するには、この表に示されているタスクを繰り返してください。
| タスク | アクション | 詳細 |
|---|---|---|
| 1 | 外部コードの特性と統合要件の評価を確認します。 | |
| 2 | エクスポートしているモデルまたはサブシステムが関数のエクスポート要件を満たしていることを確認します。 | |
| 3 | モデルまたはサブシステムを変更して、データ インターフェイス要件に対応します。 | |
| 4 | 必要に応じて、関数プロトタイプを構成します。 | Configure C Entry-Point Function Interfaces for Simulink Function and Function Caller Blocks。固定ステップのレートベース モデルについては生成された C 関数インターフェイスをモデルのエントリポイント関数用に構成またはInteractively Configure C++ Interface |
| 5 | 必要に応じて、モデルを更新し、外部のアプリケーション固有のコードを生成されたシステム関数に配置します。 | |
| 6 | シミュレーション中の関数の動作と実行が予想どおりであることを、テスト ハーネス モデルを作成および使用して確認します。テスト ハーネス モデルは、シミュレーション中の関数の実行をスケジューリングします。 | Simulink Test™ ソフトウェアを使用している場合は、テスト作成 (Simulink Test) |
| 7 | コード生成用のモデルまたはサブシステムを構成します。 | |
| 8 | コードとコード生成レポートを生成します。 | |
| 9 | 生成コード インターフェイスと静的コード メトリクスを確認します。 | Analyze Generated Data Code Interface ReportおよびStatic Code Metrics |
| 10 | エクスポートされた関数コードを含む実行可能プログラムをビルドします。 | |
| 11 | 実行可能プログラムの動作と実行が予想どおりであることを確認します。 |
統合方法の選択
外部開発環境にエクスポートするための関数コードの生成については、複数の方法を利用できます。次の表では、方法を比較しています。統合要件に最適な方法を選択してください。エクスポート関数モデルの作成方法の詳細については、エクスポート関数モデルの概要を参照してください。Function Call Subsystem のコード生成の詳細については、外部コード ベースにエクスポートするコンポーネント ソース コードの生成を参照してください。
| 条件または要件 | 使用 | 詳細 |
|---|---|---|
| Function-Call Subsystem | |
| Simulink Function ブロック | |
| コードが初期化イベントに対応 | Initialize Function ブロック | |
| コードがリセット イベントに対応 | Reset Function ブロック | |
コードには、コード ジェネレーターが既定で生成する範囲を超えたエントリポイント関数が含まれている ( | S-Function | S-Function とコード生成 |
| テスト ハーネスとして使用し、モデルの一部のために生成されたコードをエクスポートする単一モデルの実行フレームワーク | エクスポート関数サブシステム |
エクスポート関数モデルの C 関数コードの生成
この例では、スケジューリング コードを生成せずに、モデル内の個々の Function-Call Subsystem の関数コードを生成する方法について説明します。
エクスポート用の関数コードを生成するには、次を行います。
エクスポートする関数を含むモデルを作成します。
コード インターフェイスを構成します。
シミュレーション中の関数の実行をスケジューリングするテスト ハーネス モデルを作成します。
テスト ハーネス モデルを使用して関数を含むモデルをシミュレーションします。
関数を含むモデルのコードを生成します。
エクスポートする関数を含むモデルの作成
エクスポートする関数を含むモデルは、モデルのルート レベルでアーキテクチャの制約を満たさなければなりません。ルート レベルで有効なブロックは次のとおりです。
Inport
Outport
Function-Call Subsystem
Simulink Function
Goto
From
Merge
この例のコード ジェネレーターは、Initialize Function、Terminate Function および Function-Call Subsystem の各ブロックの関数コードを生成します。Initialize Function ブロックはモデル初期化イベントで実行され、Terminate Function ブロックは終了イベントで実行されます。Function-Call Subsystem ブロックは、関数呼び出し信号をアサートするルートの Inport ブロックとブロックの入力端子を接続します。サブシステムは受信した関数呼び出し信号に基づいて実行されます。
関数をエクスポートするために、モデル ComponentDeploymentFcn には 2 つの Function-Call Subsystem (Integrator および Accumulator) が含まれています。Function-call subsystem Integrator は、積分器の非周期関数を表します。この関数は前進積分法を適用し、関数を実行するたびに状態変数 x の値にゲイン値 1.25 を適用します。Function-call subsystem Accumulator は、状態変数 x の値を 1 インクリメントして調整可能なゲイン値 k を適用する周期関数を表します。この関数は、毎秒実行されます。
open_system('ComponentDeploymentFcn')モデルのコード インターフェイスの構成
モデル ComponentDeploymentFcn は、ComponentDeploymentCoderDictionary.sldd に定義されているサービス コード インターフェイスを使用するように構成されています。コード ジェネレーターはリンクされているディクショナリを使用して、既定のコード マッピングを設定します。コード マッピング エディターまたはコード マッピング プログラミング インターフェイスを使用して、このコード マッピングの表示と変更ができます。
要素の既定のインターフェイスが要件を満たしている場合、その要素を変更する必要はありません。この例では、コード インターフェイスの要件を満たすために、以下の調整が行われました。
[関数] タブで、積分器の非周期関数とアキュムレータの周期関数について、既定の関数カスタマイズ テンプレートにより関数名
CD_AperiodicとCD_Periodicが生成されます。これらの関数に関するターゲット プラットフォームの要件を満たすために、コード マッピングは関数名CD_integratorとCD_accumulatorを指定して、既定の関数名をオーバーライドします。代替タイマー サービス インターフェイスが積分器の関数に関連付けられました。コーダー ディクショナリには、2 つのタイマー サービス インターフェイスが定義されています。既定のインターフェイスと、関数名に関するターゲット プラットフォームのタイマー サービスの要件を満たす代替インターフェイス
get_CD_tickです。タイマー サービスの設定を確認するには、[関数] タブで、Exported Function:Aperiodicの行を選択して鉛筆アイコンをクリックします。表示されたダイアログ ボックスで、[タイマー サービス] プロパティがget_CD_tickに設定されていることを確認します。あるいは、プロパティ インスペクターでこのプロパティを設定できます。[パラメーター] タブで、Gain ブロックの [ゲイン] パラメーター
kにコード識別子が指定されました。識別子の設定を確認するには、[モデル パラメーター] タブで、そのパラメーターの行を選択して鉛筆アイコンをクリックします。表示されたダイアログ ボックスで、[識別子] プロパティに指定された値kを確認します。識別子は、生成コード内での変数の表現方法をコード ジェネレーターに通知します。あるいは、プロパティ インスペクターでこのプロパティを設定できます。[信号/状態] タブで、Discrete-Time Integrator ブロックおよび Unit Delay ブロックに関連付けられている状態に、コード識別子が指定されました。識別子の設定 (
dtiおよびdelay) を確認するには、着目する状態の行を選択して鉛筆アイコンをクリックします。表示されたダイアログ ボックスで、[識別子] プロパティに指定された値を確認します。識別子は、生成コード内での対応する変数の表現方法をコード ジェネレーターに通知します。あるいは、プロパティ インスペクターでこのプロパティを設定できます。
コード マッピングを確認するには、Embedded Coder アプリを開きます。次に、[コード インターフェイス]、[コンポーネント インターフェイス] を選択します。アプリ表示の下部に、コード マッピング エディターが表示されます。
コード マッピング エディターで、送信側、受信側、データ転送およびタイマーの各サービスのインターフェイスを変更できます。送信側、受信側およびデータ転送のサービスを変更するには、対応するタブをクリックし、サービス列から別のサービスを選択します。タイマー サービスを変更するには、[Functions] タブをクリックし、積分器の関数の行を選択して鉛筆アイコンをクリックします。そして、表示されたダイアログで、別のインターフェイスを選択します。既定のインターフェイスは、実行外のデータ通信方法を使用します。代替インターフェイスは、実行中および直接アクセスのデータ通信を使用します。インターフェイスを変更して、生成コード内の差異を確認することを検討してください。インターフェイスを変更することを選択した場合は、信号のデータ パスに沿って呼び出されるサービスのそれぞれについて、同じデータ通信方法が適用されるようにインターフェイスを設定します。
サービス インターフェイスに応じたモデルのコード マッピングの詳細については、C サービス インターフェイスおよびコード マッピング エディター – Cを参照してください。
シミュレーション用のテスト ハーネス モデルの作成
関数をエクスポートする際に、生成コードにはスケジューラは含まれません。シミュレーション中のスケジューリングを処理するテスト ハーネス モデルを作成します。展開するコードを生成するためにテスト ハーネス モデルを使用しないでください。
モデル ComponentDeploymentFcnHarness はテスト ハーネスです。このモデルはこの例の他のモデルに、モデルの内容をスケジュールする (モデルの初期化および終了のイベントなど) 関数呼び出し信号を提供します。
open_system('ComponentDeploymentFcnHarness')このモデルの場合、Embedded Coder アプリの [出力] が Simulation Only に設定されています。この設定では、ユーザーが別の Simulink エディター ウィンドウを開くことなく、テスト ハーネス モデルと、コードを生成する対象のモデルとの間でフォーカスを切り替えることができます。
テスト ハーネス モデルのシミュレーション
エクスポートする関数を含むモデルが予期したとおりに実行されることを、テスト ハーネス モデルのシミュレーションによって検証します。たとえば、ComponentDeploymentFcnHarness のシミュレーションを実行します。
sim('ComponentDeploymentFcnHarness')### Searching for referenced models in model 'ComponentDeploymentFcnHarness'.
### Total of 1 models to build.
### Searching for referenced models in model 'ComponentDeploymentFcn'.
### Total of 1 models to build.
### Starting build procedure for: ComponentDeploymentFcn
### Successful completion of build procedure for: ComponentDeploymentFcn
Build Summary
Top model targets:
Model Build Reason Status Build Duration
=========================================================================================================================
ComponentDeploymentFcn Information cache folder or artifacts were missing. Code generated and compiled. 0h 0m 7.9249s
1 of 1 models built (0 models already up to date)
Build duration: 0h 0m 8.3053s
### Preparing to start SIL simulation ...
Building with 'gcc'.
MEX completed successfully.
### Writing source file rte_timer.c
### Writing header file rte_private_timer.h
### Writing source file rte_data_transfer.c
### Updating code generation report with SIL files ...
### Starting SIL simulation for component: ComponentDeploymentFcn
### Application stopped
### Stopping SIL simulation for component: ComponentDeploymentFcn
### Starting SIL simulation for component: ComponentDeploymentFcn
### Application stopped
### Stopping SIL simulation for component: ComponentDeploymentFcn
### Starting SIL simulation for component: ComponentDeploymentFcn
### Application stopped
### Stopping SIL simulation for component: ComponentDeploymentFcn
### Starting SIL simulation for component: ComponentDeploymentFcn
### Application stopped
### Stopping SIL simulation for component: ComponentDeploymentFcn
### Starting SIL simulation for component: ComponentDeploymentFcn
### Application stopped
### Stopping SIL simulation for component: ComponentDeploymentFcn
### Starting SIL simulation for component: ComponentDeploymentFcn
### Application stopped
### Stopping SIL simulation for component: ComponentDeploymentFcn
### Starting SIL simulation for component: ComponentDeploymentFcn
### Application stopped
### Stopping SIL simulation for component: ComponentDeploymentFcn
### Starting SIL simulation for component: ComponentDeploymentFcn
### Application stopped
### Stopping SIL simulation for component: ComponentDeploymentFcn
### Starting SIL simulation for component: ComponentDeploymentFcn
### Application stopped
### Stopping SIL simulation for component: ComponentDeploymentFcn
### Starting SIL simulation for component: ComponentDeploymentFcn
### Application stopped
### Stopping SIL simulation for component: ComponentDeploymentFcn
関数コードの生成
"Embedded Coder" アプリ内で、ComponentDeploymentFcn をダブルクリックしてフォーカスをコンポーネント モデルに切り替えます。次に、エクスポートする関数のコードを生成します。
slbuild('ComponentDeploymentFcn')### Searching for referenced models in model 'ComponentDeploymentFcn'. ### Total of 1 models to build. ### Starting build procedure for: ComponentDeploymentFcn ### Generated code for 'ComponentDeploymentFcn' is up to date because no structural, parameter or code replacement library changes were found. ### Successful completion of code generation for: ComponentDeploymentFcn Build Summary 0 of 1 models built (1 models already up to date) Build duration: 0h 0m 2.0993s
生成コードのレビュー
生成コードのレビューコード ジェネレーターは、現在の作業フォルダーにフォルダー ComponentDeploymentFcn_ert_rtw を作成し、そのフォルダーにソース コード ファイルを配置します。生成コードは 2 つの主要ファイル、すなわちヘッダー ファイル ComponentDeploymentFcn.h とソース コード ファイル ComponentDeploymentFcn.c に入れられます。ComponentDeploymentFcn.c は初期化関数、エクスポートされた関数 Integrator および Accumulator、さらに終了関数を呼び出します。モデル データとエントリポイント関数は、ヘッダー ファイルをインクルードすることで呼び出し元からアクセスできます。
コード ジェネレーターは、rtwtypes.h およびサービス ヘッダー ファイルも生成します。コード ジェネレーターは既定でこのヘッダー ファイルに services.h という名前を付けます。ヘッダー ファイル rtwtypes.h は、生成コードが必要とするデータ型、構造体およびマクロを定義します。ヘッダー ファイル services.h はインターフェイス ヘッダー ファイルであり、サブフォルダー services に配置されます。
生成コードを検査するには、生成されたコード インターフェイス レポートを使用するか、Embedded Coder アプリのコード ビューを使用します。このレポートは、生成されたインターフェイス コードがターゲット プラットフォームの要件を満たしていることを検証する上で役立ちます。詳細については、Analyze Generated Service Code Interface Reportを参照してください。
インターフェイス コードの記述
コード インターフェイス レポートを開いてレビューします。実行フレームワークのインターフェイス コードを記述するために、このレポートの情報を使用します。
命令
#include ComponentDeploymentFcn.h、#include rtwtypes.hおよび#include services.hを追加することによって、生成されたヘッダー ファイルをインクルードします。モデルの Inport ブロックの生成コードへの入力データを記述します。
生成されたエントリポイント関数を呼び出します。
モデルの Outport ブロックの生成コードからデータを読み取ります。
エントリポイント関数:
エントリポイント関数の初期化、
void CD_initialize(void)。開始時にこの関数を一度呼び出します。この関数はインターフェイス関数get_CD_initialize_InBus_NVMを呼び出すことにより、ターゲット環境の受信側サービスを使用して不揮発性メモリからデータを読み取ります。終了エントリポイント関数
void CD_terminate(void)。シャットダウン時に、この関数を一度呼び出します。この関数はインターフェイス関数getref_CD_terminate_OutBus_NVMを呼び出すことにより、ターゲット環境の送信側サービスを使用して不揮発性メモリにデータを書き込みます。エクスポートされた周期関数
void CD_accumulator(void)。必要に応じてこの関数を呼び出します。この関数はインターフェイス関数getref_CD_accumulator_OutBus_yを呼び出すことにより、ターゲット環境の送信側サービスを使用して関数の出力を書き込みます。エクスポートされた非周期関数
void CD_integrator(void)。必要に応じてこの関数を呼び出します。この関数はインターフェイス関数get_CD_integrator_inBus_uを呼び出すことにより、ターゲット環境の受信側サービスを使用して入力を関数に読み込みます。また、関数 CD_integrator もターゲット環境のタイマー サービスを使用し、インターフェイス関数get_tick_outside_CD_integratorを呼び出すことにより、ターゲット環境の関数の時間刻みを取得します。
詳細
エクスポート関数モデルの C++ 関数とクラス コードの生成
この例では、Function-Call Subsystem を含むエクスポート関数モデルの関数コードの生成方法を示します。コード ジェネレーターは、スケジューリング コードを含まない関数とクラス コードを生成します。
エクスポート用の関数コードを生成するには、次を行います。
エクスポートする関数を含むモデルを作成します。
シミュレーション中の関数の実行をスケジューリングするテスト ハーネス モデルを作成します。
テスト ハーネス モデルを使用して関数を含むモデルをシミュレーションします。
関数を含むモデルのコードを生成します。
エクスポート用の関数と C++ クラス インターフェイスを含むモデルの作成
C++ モデル クラス インターフェイスを使用してエクスポートする関数を含むモデルは、モデルのルート レベルでアーキテクチャの制約を満たさなければなりません。C++ クラスの生成において、ルート レベルで有効なブロックは次のとおりです。
Inport
Outport
Function-Call Subsystem
Goto
From
Merge
メモ: C++ クラス インターフェイスを使用した Function-Call Subsystem のエクスポートは、Simulink Function ブロックをサポートしません。
コード ジェネレーターは Function-Call Subsystem ブロックの関数コードを生成します。Function-Call Subsystem ブロックは、関数呼び出し信号をアサートするルートの Inport ブロックとブロックの入力端子を接続します。サブシステムは受信した関数呼び出し信号に基づいて実行されます。
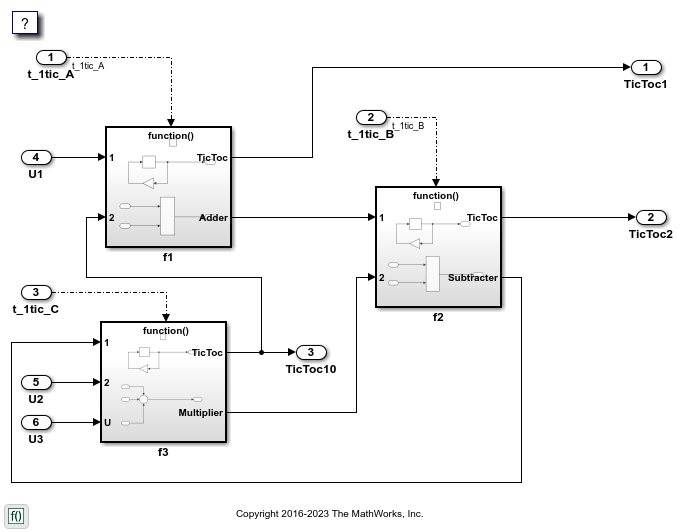
モデル CppClassFunctions には、関数をエクスポートするための Function-Call Subsystem f1、f2、f3 が含まれます。
open_system('CppClassFunctions')
シミュレーション用のテスト ハーネス モデルの作成
関数をエクスポートする際に、生成コードにはスケジューラは含まれません。シミュレーション中のスケジューリングを処理するテスト ハーネス モデルを作成します。展開するコードを生成するためにテスト ハーネス モデルを使用しないでください。
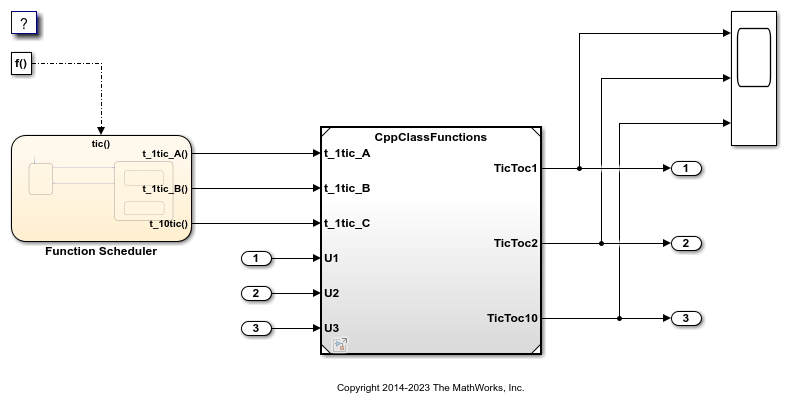
モデル CppClassFunctionsHarness はテスト ハーネスです。このモデルは、モデルのコンテンツをスケジュールするために、関数呼び出し信号をこの例の他のモデルに提供します。
open_system('CppClassFunctionsHarness')
テスト ハーネス モデルのシミュレーション
エクスポートする関数を含むモデルが予期したとおりに実行されることを、テスト ハーネス モデルのシミュレーションによって検証します。たとえば、CppClassFunctionsHarness のシミュレーションを実行します。
sim('CppClassFunctionsHarness')
関数のコードとレポートの生成
エクスポートする関数のコードとコード生成レポートを生成します。たとえば、CppClassFunctions のコードを生成します。
slbuild('CppClassFunctions')
### Searching for referenced models in model 'CppClassFunctions'. ### Total of 1 models to build. ### Starting build procedure for: CppClassFunctions ### Successful completion of build procedure for: CppClassFunctions Build Summary Top model targets: Model Build Reason Status Build Duration ==================================================================================================================== CppClassFunctions Information cache folder or artifacts were missing. Code generated and compiled. 0h 0m 5.9843s 1 of 1 models built (0 models already up to date) Build duration: 0h 0m 6.6553s
生成コードのレビュー
コード生成レポートで生成されたコードをレビューします。
ert_main.cppはモデル用の main プログラムの例 (実行フレームワーク) を示す。このコードは、エクスポートされた関数を呼び出す方法を示しています。また、このコードは生成済みのコードの初期化と実行の方法も示しています。CppClassFunctions.cppは、モデル サブシステムのコンポーネントf1、f2およびf3の初期化関数 (Initialize Functionを含む) とエクスポート関数を呼び出す。CppClassFunctions.hはモデルのデータ構造体と、エクスポートされたエントリポイント関数およびデータ構造体のパブリック インターフェイスを宣言する。rtwtypes.hは、生成コードが必要とするデータ型、構造体およびマクロを定義する。
インターフェイス コードの記述
コード インターフェイス レポートを開いてレビューします。実行フレームワークのインターフェイス コードを記述するために、このレポートの情報を使用します。
命令
#include CppClassFunctions.hおよび#include rtwtypes.hを追加することによって、生成されたヘッダー ファイルをインクルードします。モデルの Inport ブロックの生成コードへの入力データを記述します。
生成されたエントリポイント関数を呼び出します。
モデルの Outport ブロックの生成コードからデータを読み取ります。
入力端子:
次元 1 の
real_T型のrtU.U1次元 1 の
real_T型のrtU.U2次元 1 の
real_T型のrtU.U3
エントリポイント関数:
エントリポイント関数の初期化、
void initialize(void)。開始時にこの関数を一度呼び出します。エクスポート関数、
void t_1tic_A(void)。必要に応じてこの関数を呼び出します。エクスポート関数、
void t_1tic_B(void)。必要に応じてこの関数を呼び出します。エクスポート関数、
void t_1tic_C(void)。必要に応じてこの関数を呼び出します。
出力端子:
次元 [2] の
int8_T型のrtY.TicToc1次元 [2] の
int8_T型のrtY.TicToc2次元 1 の
int8_T型のrtY.TicToc10
モデル例を閉じる
bdclose('CppClassFunctionsHarness') bdclose('CppClassFunctions')
詳細