variationProperties
Description
Add-On Required: This feature requires the Automated Driving Toolbox Test Suite for Euro NCAP Protocols add-on.
The variationProperties object stores scenario property
variations, such as actor, collision, scene, and Euro NCAP® test bench properties, to use to create scenario variants.
Creation
Description
variations = variationPropertiesvariationProperties object, variations.
Properties
Object Functions
varyActorProperties | Add variations to actor properties |
varyCollisionProperties | Add variations to collision properties |
varySceneProperties | Add variations to scene properties |
varyTestProperties | Add variations to Euro NCAP test bench properties |
Examples
Create an empty variationProperties object.
variation = variationProperties;
Display empty actor properties.
disp(variation.ActorVariationProperties)
ActorID: []
Speed: []
Dimension: []
Waypoints: []
Yaw: []
Add speed and waypoint variations to the actor with an ActorID of 1.
waypoints = [0 0 0; 10 0 0]; varyActorProperties(variation,1,Speed=10,Waypoints=waypoints);
Display the actor property variations.
disp(variation.ActorVariationProperties)
ActorID: 1
Speed: 10
Dimension: []
Waypoints: [2×3 double]
Yaw: []
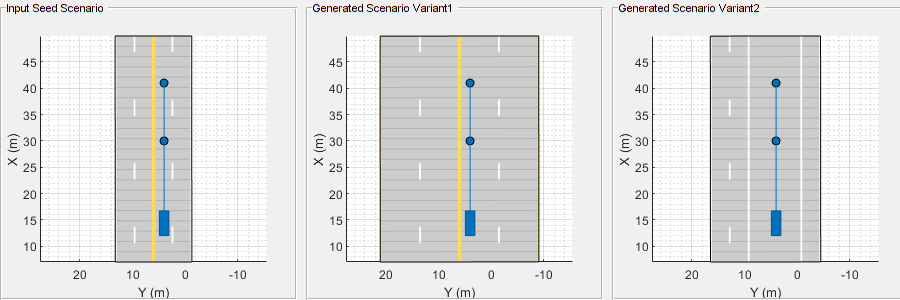
Load a driving scenario into the workspace.
load("scenarioWithSingleActor.mat")Create a scenario descriptor from the input seed scenario.
seedScenarioDescriptor = getScenarioDescriptor(sc,Simulator="DrivingScenario");Create a variationProperties object.
variation1 = variationProperties;
Add scene property variations to a road by specifying the road ID, width of the road, and marking color of the road boundaries.
roadID = 1;
varySceneProperties(variation1,roadID,Width=30,MarkingColor="yellow")ans =
variationProperties with properties:
ActorVariationProperties: [1×1 struct]
CollisionVariationProperties: []
SceneVariationProperties: [1×1 struct]
TestVariationProperties: [1×1 struct]
Using the seed scenario descriptor and the scene variation, generate a scenario variant descriptor.
scenarioVariantDescriptor1 = generateVariants(seedScenarioDescriptor,variation1);
Generate a variant scenario, as a drivingScenario object, from the scenario variant descriptor object.
scenarioVariant1 = getScenario(scenarioVariantDescriptor1,Simulator="DrivingScenario");Create another variationProperties object.
variation2 = variationProperties;
Add scene property variations to a lane by specifying the road ID, lane ID, width of the lane, lane marking, and marking color of the lane boundaries.
roadID = 1; laneID = 2; varySceneProperties(variation2,roadID,laneID,Width=10,Marking="solid",MarkingColor="white")
ans =
variationProperties with properties:
ActorVariationProperties: [1×1 struct]
CollisionVariationProperties: []
SceneVariationProperties: [1×1 struct]
TestVariationProperties: [1×1 struct]
Using the seed scenario descriptor and the scene variation, generate another scenario variant descriptor.
scenarioVariantDescriptor2 = generateVariants(seedScenarioDescriptor,variation2);
Generate another variant scenario, as a drivingScenario object, from the scenario variant descriptor object.
scenarioVariant2 = getScenario(scenarioVariantDescriptor2,Simulator="DrivingScenario");Create a custom figure window to plot the seed scenario and the scenario variants.
figScene = figure; set(figScene,Position=[200 200 900 300]) hCarViewPanel1 = uipanel(figScene,Position=[0 0 0.33 1],Title="Input Seed Scenario"); hCarPlot1 = axes(hCarViewPanel1); hCarViewPanel2 = uipanel(figScene,Position=[0.34 0 0.33 1],Title='Generated Scenario Variant1'); hCarPlot2 = axes(hCarViewPanel2); hCarViewPanel3 = uipanel(figScene,Position=[0.68 0 0.33 1],Title='Generated Scenario Variant2'); hCarPlot3 = axes(hCarViewPanel3);
Plot the seed scenario and its variants. Observe the scene variation in the generated scenario variants.
plot(sc,Waypoints="on",Parent=hCarPlot1) plot(scenarioVariant1,Waypoints="on",Parent=hCarPlot2) plot(scenarioVariant2,Waypoints="on",Parent=hCarPlot3)
Tips
To apply actor property variations and collision variations to your seed scenario, use the
generateVariantsfunction.