generateVariants
Generate variant scenario descriptors from seed scenario descriptor using specified variations
Since R2023a
Syntax
Description
Add-On Required: This feature requires the Automated Driving Toolbox Test Suite for Euro NCAP Protocols add-on.
variantDescriptors = generateVariants(descriptor,variations)descriptor and variation properties object
variations.
[
also returns a structure, variantDescriptors,variantInfo] = generateVariants(descriptor,variations)variantInfo, containing the properties of
actor and collision variations.
Examples
Load a driving scenario into the workspace.
load("scenarioWithSingleActor.mat")Create a scenario descriptor from the input seed scenario.
seedScenarioDescriptor = getScenarioDescriptor(sc,Simulator="DrivingScenario");Create a variationProperties object.
variation = variationProperties;
Specify actor dimension variations.
dimension=struct("Length",2,"Width",2,"Height",4);
Add a speed variation for the actor with an actorID of 1.
varyActorProperties(variation,1,Speed=10,Dimension=dimension);
Using the seed scenario descriptor and the speed variation, generate a scenario variant descriptor.
scenarioVariantDescriptor = generateVariants(seedScenarioDescriptor,variation);
Generate a variant scenario, as a drivingScenario object, from the scenario variant descriptor object.
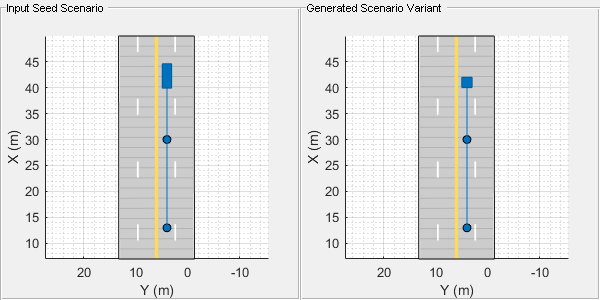
scenarioVariant = getScenario(scenarioVariantDescriptor,Simulator="DrivingScenario");Create a custom figure window to plot the seed scenario and the scenario variant.
figScene = figure; set(figScene,Position=[200 200 600 300]) hCarViewPanel1 = uipanel(figScene,Position=[0 0 0.5 1],Title="Input Seed Scenario"); hCarPlot1 = axes(hCarViewPanel1); hCarViewPanel2 = uipanel(figScene,Position=[0.5 0 0.5 1],Title='Generated Scenario Variant'); hCarPlot2 = axes(hCarViewPanel2);
Plot both the scenarios and run the simulation. Observe the actor speed and dimension variation in the generated scenario variant.
plot(sc,Waypoints="on",Parent=hCarPlot1) plot(scenarioVariant,Waypoints="on",Parent=hCarPlot2) flag1 = 1; flag2 = 1; while (flag1 || flag2) if(flag1) flag1 = advance(sc); end if(flag2) flag2 = advance(scenarioVariant); end pause(0.01) end
Input Arguments
Output Arguments
Limitations
To apply collision variations, your seed scenario must contain actor collisions.
The collision side of an actor in the seed scenario must match the collision side of that actor for which you generate variants.
To generate actor collision fraction variations, the actors in the seed scenario must collide at 0 degree and 90 degree angles.