table2scenario
Syntax
Description
Add-On Required: This feature requires the Automated Driving Toolbox Test Suite for Euro NCAP Protocols add-on.
descriptor = table2scenario(sceneSpec)ScenarioDescriptor object,
descriptor, by using the information in the input scene specification
table sceneSpec. For best results, create specification tables using
CSV files or spreadsheet files (including from Microsoft®
Excel®), and then convert them to the MATLAB table format by using the readtable function.
descriptor = table2scenario(sceneSpec,actorSpec)actorSpec.
descriptor = table2scenario(sceneSpec,actorSpec,eventSpec)eventSpec.
descriptor = table2scenario(___,Name=Value)ShowPlot=true
creates a figure and displays the generated scene.
Examples
Load a table containing scene specifications into the workspace.
sceneSpec = load("sceneData.mat");Generate a ScenarioDescriptor object by using the loaded data.
scenarioDescriptor = table2scenario(sceneSpec.sceneData);
Create a drivingScenario object from the generated ScenarioDescriptor object.
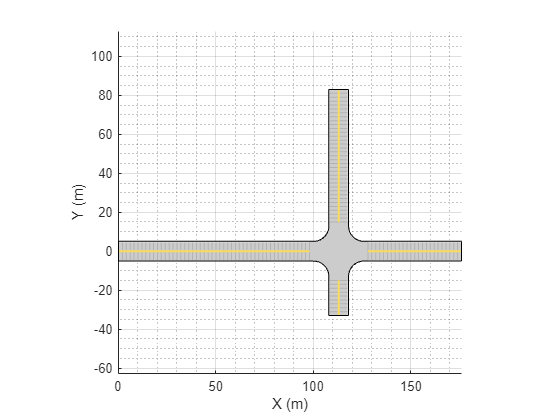
scenarioDS = getScenario(scenarioDescriptor,Simulator="DrivingScenario");Visualize the roads in the scene created using the scene specification table.
plot(scenarioDS)
Load a table containing lane specifications and a table containing scene specifications into the workspace
laneSpec = load("laneData.mat"); sceneSpec = load("sceneDataWithLane.mat");
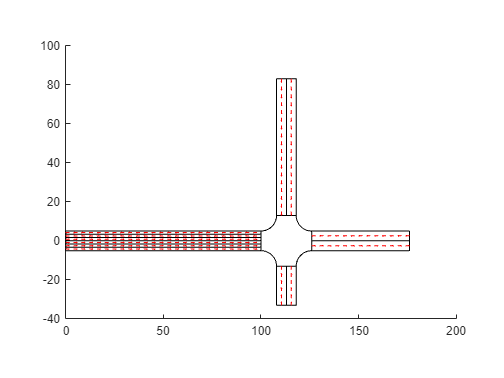
Generate a ScenarioDescriptor object by using the loaded tabular data, and plot the scene.
scenarioDescriptor = table2scenario(sceneSpec.sceneData,LaneSpec=laneSpec.laneData,ShowPlot=true);
Load a table containing scene specifications, a table containing actor specifications, and a table containing actor event specifications into the workspace.
sceneSpec = load("sceneData.mat"); actorSpec = load("actorData.mat"); eventSpec = load("eventData.mat");
Generate a ScenarioDescriptor object by using the loaded tabular data.
scenarioDescriptor = table2scenario(sceneSpec.sceneData,actorSpec.actorData,eventSpec.eventData);
Create a drivingScenario object from the ScenarioDescriptor object.
scenarioDS = getScenario(scenarioDescriptor,Simulator="DrivingScenario");Open the generated driving scenario in the Driving Scenario Designer app.
drivingScenarioDesigner(scenarioDS)
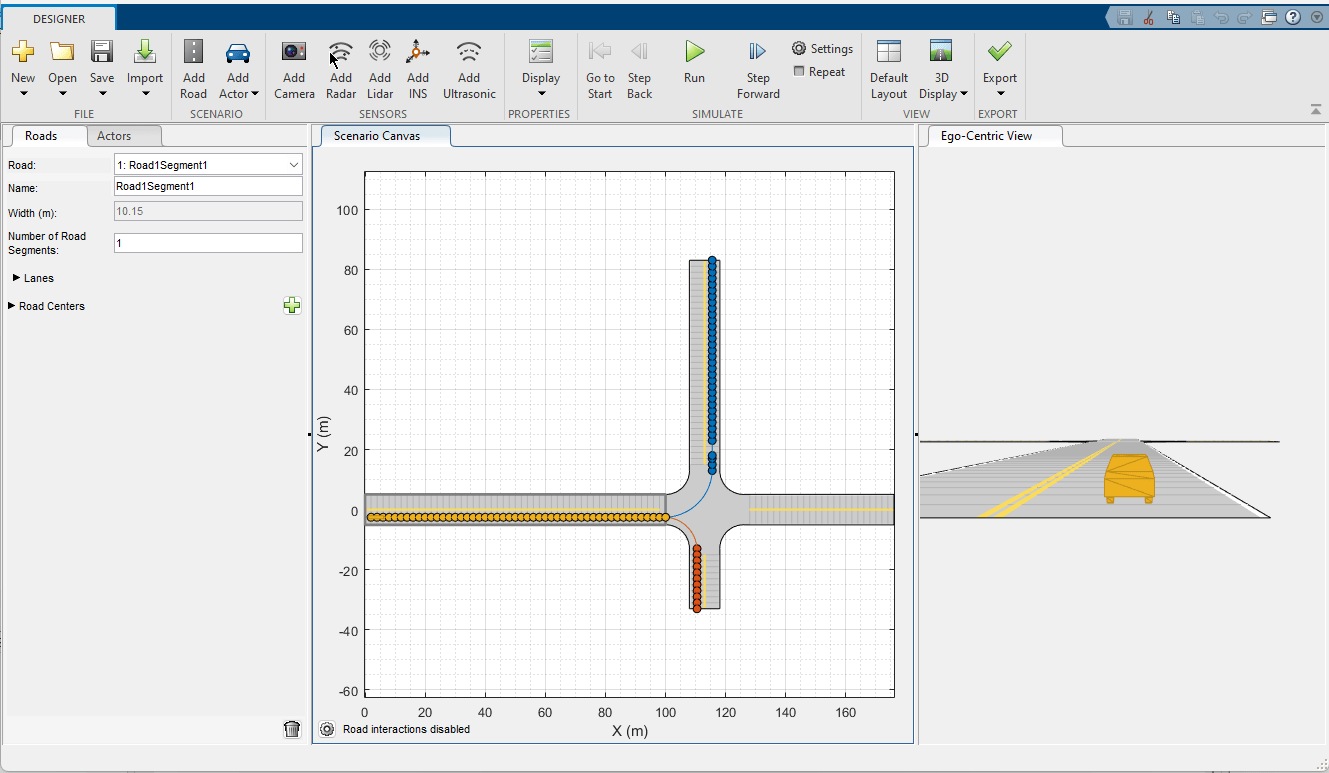
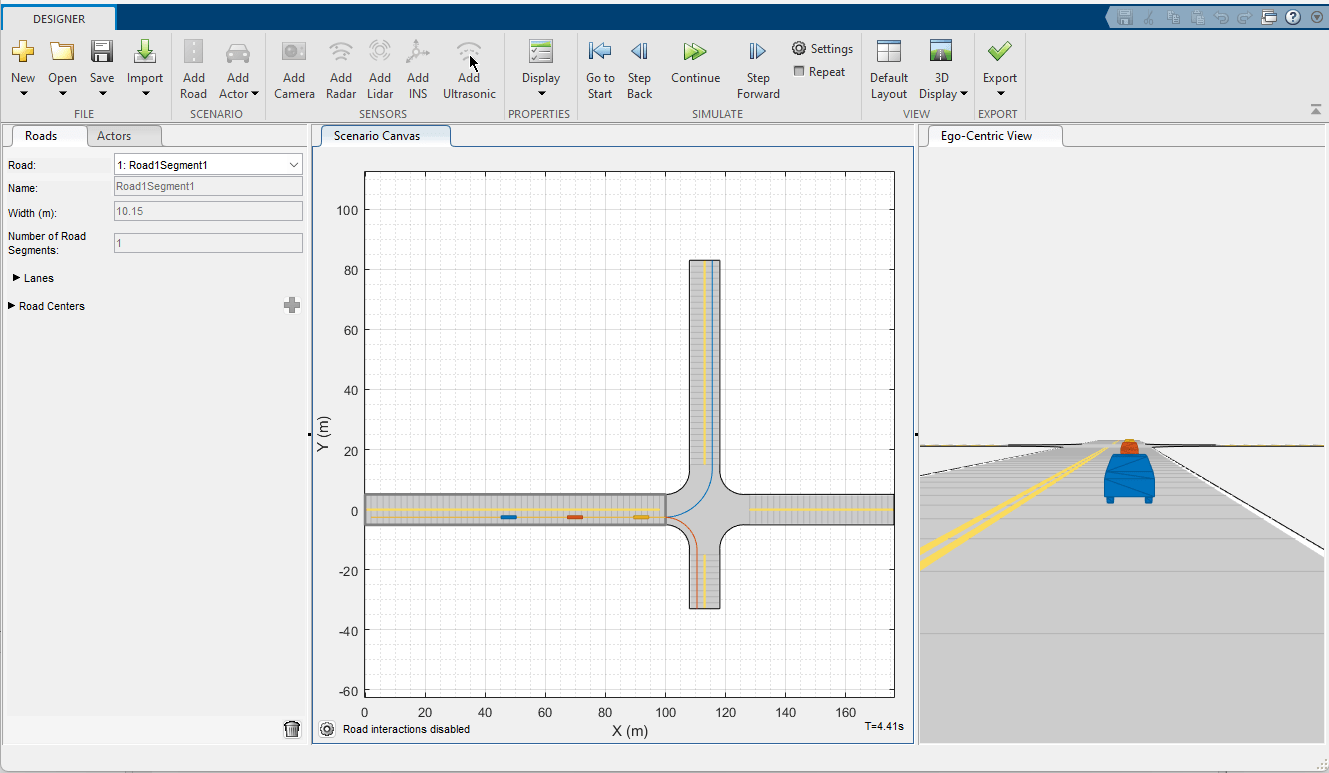
Click the Run button to run and visualize the scenario. Observe that the scenario contains three actors performing their events as specified in the event specification table, eventSpec.eventData.
Input Arguments
Name-Value Arguments
Output Arguments
More About
Specify the column names in the first row of your spreadsheet or CSV file. The scene specification tables can contain these columns.
| Column | Description |
|---|---|
RoadElementID | ID of the road element, specified as a positive integer. |
RoadElementType | Type of road element, specified as one of these road element types:
Note When you specify
|
Length_Radius | Length of the road or radius of curvature for the junction, specified
as a positive scalar. This table describes the values of
|
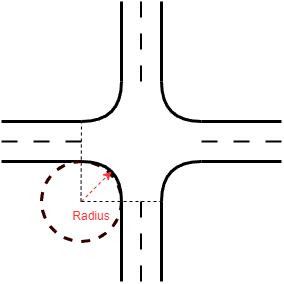
DeltaHeading | Change in the heading angle of a road, specified as positive scalar.
Units are in degrees. This table describes the values of
|
ParentIntersectionID (optional) | ID of parent intersection junction linked to the current road,
specified as a positive integer. The This value must
be
Note Include the |
LaneSpecID (optional) | ID of the lane specification, specified as a positive integer. The ID
must match a Note Include the |
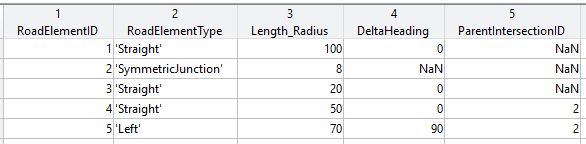
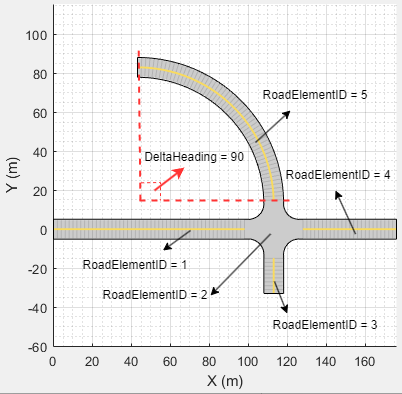
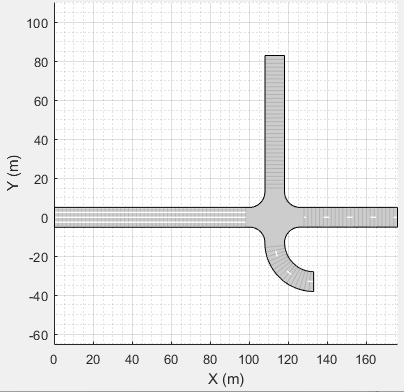
This example shows a scene specification table and the scene created using it.
| Scene Specification Table | Generated Scene |
|---|---|
|
|
|
Lane specification tables must contain these columns.
| Column | Description |
|---|---|
LaneSpecID | ID of the lane specification, specified as a positive integer. |
LeftLaneCount | Number of left lanes, specified as a positive integer. The
default value is |
RightLaneCount | Number of right lanes, specified as a positive integer. The
default value is |
LaneMarking | Lane marking, specified as The
default value is |
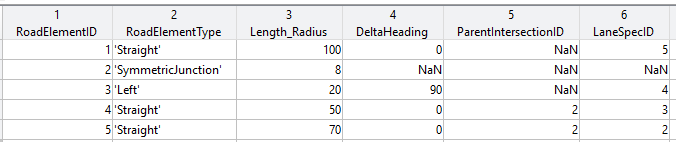
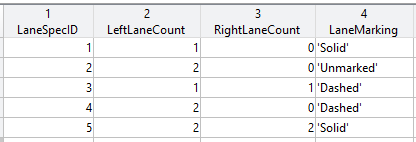
This example shows a scene specification table, a lane specification table, and the scene created using them.
| Scene and Lane Specification Tables | Generated Scene |
|---|---|
An example of scene specification table:
|
|
An example of lane specification table: |
Actor specification tables must contain these columns.
| Column | Description |
|---|---|
ActorID | ID of the actor, specified as a positive integer. |
RoadID | ID of the road on which to place the actor, specified as a positive integer. |
LaneID | ID of the lane on which to place the actor, specified as a positive integer. |
ActorType | Type of the actor, specified as The
default actor type is |
ActorName | Name of the actor, specified as a string. The default name
is a concatenation of the string |
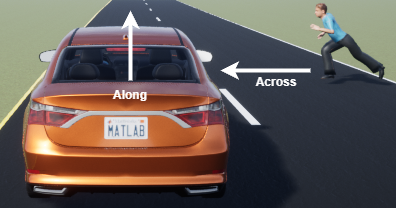
Dimension | Dimensions of the actor, specified as a six-element row vector of the
form [
For more information on these dimensions, see Actor and Vehicle Positions and Dimensions. If you specify this value in a form other than a six-element row
vector, by default, this function uses this value: [ |
Heading | Travel direction of the actor, specified as
The default actor direction is
|
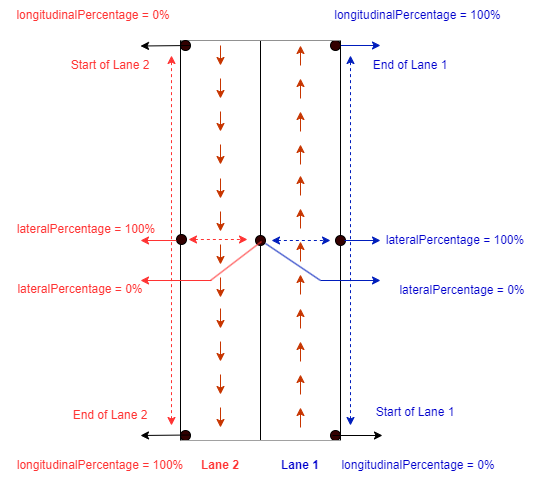
RelativePosition | Start position of the actor on a lane relative to the lane direction,
in percentage, specified as a comma-separated string of the form
[
This figure shows the longitudinal and lateral positions of an
actor on a lane, in percentages, relative to the directional lane length and
lane width. Note that percentage values are relative to the lane, rather than
the road, the actor occupies. The default value of
|
For more information on using the actor specification table, see the Generate Scenario Using Tabular Data example.
Tips
To create input specification tables from a spreadsheet file (including from Microsoft Excel), use the
readtablefunction.To get a scenario from a
ScenarioDescriptorobject, use thegetScenariofunction.
Version History
Introduced in R2024a
See Also
ncapSpec | ncapScenario | getScenario | drivingScenario | vehicle | generateVariants