comm.GMSKTimingSynchronizer
4 次非線形性法を使用したシンボル タイミング位相の再生
説明
comm.GMSKTimingSynchronizer System object™ は、4 次非線形性法を使用して、ガウス最小偏移変調 (GMSK) の変調信号のシンボル タイミング位相を再生します。このオブジェクトは、一般的なデータ支援を用いないフィードバック メソッドを実現します。このメソッドは、搬送波位相の再生とは独立で、搬送波周波数オフセットに対する事前の補償を必要とします。
GMSK 変調信号のシンボル タイミング位相を再生するには、以下の手順に従います。
comm.GMSKTimingSynchronizerオブジェクトを作成し、そのプロパティを設定します。関数と同様に、引数を指定してオブジェクトを呼び出します。
System object の機能の詳細については、System object とはを参照してください。
作成
構文
説明
gmskTimingSync = comm.GMSKTimingSynchronizergmskTimingSync を作成します。このオブジェクトは、4 次非線形性法を使用して GMSK 変調信号のシンボル タイミング位相を再生します。
gmskTimingSync = comm.GMSKTimingSynchronizer(Name=Value)comm.GMSKTimingSynchronizer(ErrorUpdateGain=0.045) は、誤り更新ステップ サイズを 0.045 に設定します。
プロパティ
使用法
説明
入力引数
出力引数
オブジェクト関数
オブジェクト関数を使用するには、System object を最初の入力引数として指定します。たとえば、obj という名前の System object のシステム リソースを解放するには、次の構文を使用します。
release(obj)
例
ビット入力を true に設定し、シンボルあたりのサンプル数を 14 に設定した GMSK 変調器を作成します。
gmskMod = comm.GMSKModulator(BitInput=true, ...
SamplesPerSymbol=14);タイミング オフセット値を定義します。
timingOffset = 0.2;
可変非整数遅延 System object™ を作成します。
varDelay = dsp.VariableFractionalDelay;
シンボルあたりのサンプル数を 14 に設定し、誤り更新ゲインを 0.045 に設定した GMSK タイミング同期 System object を作成します。
gmskTimingSync = comm.GMSKTimingSynchronizer(SamplesPerSymbol=14, ...
ErrorUpdateGain=0.045);次の手順に従ってループを実行し、データのフレームを処理します。
ランダムなバイナリ データ ベクトルを生成します。
GMSK 変調を使用してバイナリ データを変調します。
変調されたデータにタイミング オフセット エラーを適用します。
劣化した信号に対してタイミング位相再生を実行します。
シンボルあたりのサンプル数で正規化された最初の位相推定値を保存します。
phEst = zeros(50,1); for i = 1:50 data = randi([0 1],100,1); modData = gmskMod(data); impairedData = varDelay(modData,timingOffset*14); [~,phase] = gmskTimingSync(impairedData); phEst(i) = phase(1)/14; end
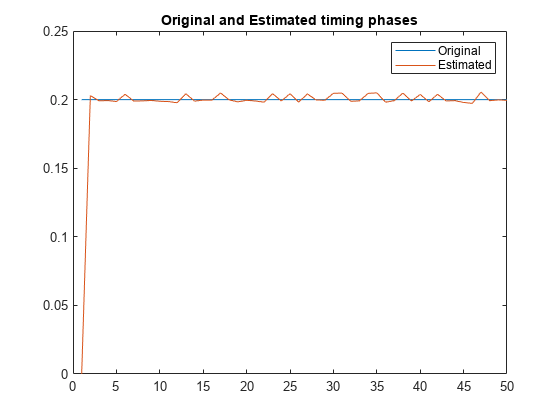
元のタイミング位相の結果と推定されたタイミング位相の結果をプロットします。
plot(1:50,[0.2*ones(50,1) phEst]) legend( "Original","Estimated") title("Original and Estimated Timing Phases")
アルゴリズム
タイミング抽出アルゴリズムは次の手順で構成されます。
サンプリングされたベースバンド信号を 4 次非線形に通してタイミング情報を抽出します。
非線形性に従って信号をデジタル的に微分します。
デジタル微分器の出力を平滑化してエラー信号を生成します。
誤差信号を使用して、ベースバンド信号のサンプリングを調整します。
より具体的には、このアルゴリズムは、k 番目のシンボルについてタイミング誤差の値 e(k) を出力するタイミング誤差検出器を採用しています。これは、Synchronization Techniques for Digital Receivers by Mengali, Umberto and Aldo N. D’Andrea (New York: Plenum Press, 1997) で、次の式によって定義されています。
ここで、
r は入力信号
T はシンボル周期
Ts はサンプリング周期
* は複素共役
dk は k 番目のシンボルの位相推定
D は、MSK 変調では 1、ガウス MSK 変調では 2
参照
[1] Mengali, Umberto and Aldo N. D’Andrea. Synchronization Techniques for Digital Receivers. New York: Plenum Press, 1997.
拡張機能
バージョン履歴
R2012a で導入