このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
NASA HL-20 揚力体機体
はじめに
このケーススタディでは、スペースシャトルのオービターを低コストで補完する NASA HL-20 揚力体の機体をモデル化します。HL-20 は動力なしですが、モデルには機体とコントローラーの両方が含まれています。
ほとんどの飛行制御設計では、機体またはプラント モデルをモデル化し、シミュレーションし、分析する必要があります。理想的には、この機体は、ブロックまたはモデル構造を再利用して検証時間を短縮し、制御設計に使用できる時間を増やすことで、迅速にモデル化する必要があります。この研究では、Aerospace Blockset™ ソフトウェアが HL-20 機体の一部を効率的にモデル化します。空力係数の計算を含む残りの部分は、Simulink® ソフトウェアでモデル化されます。このケーススタディでは、HL-20 機体モデルを調査し、モデル内で空力データがどのように使用されるかについて説明します。
NASA HL-20 揚力体
HL-20 は、人員発射システム (PLS) としても知られ、スペース シャトル オービターを補完するために設計された揚力体再突入体です。もともとは、低地球軌道への往復のための低コストのソリューションとして開発されました。最大 10 人の乗客と限られた貨物 [1] を運ぶことができます。
HL-20 揚力体は、ブースターロケットで垂直に打ち上げるか、スペースシャトルの軌道船のペイロードベイで輸送することで軌道上に配置できます。HL-20 揚力体は、小型の搭載推進システムを使用して軌道から離脱します。再突入時の姿勢は機首から水平、無動力です。
HL-20リフティングボディの上部正面図(写真:NASAラングレー
HL-20 設計には多くの利点があります。
着陸から打ち上げまでのターンアラウンドが迅速化されるため、運用コストが削減されます。
HL-20 は優れた飛行安全性を備えています。
航空機の滑走路に従来通り着陸できます。
HL-20の潜在的な用途としては、
取り残された宇宙飛行士の軌道上救助
国際宇宙ステーションの乗組員交換
観測ミッション
衛星サービスミッション
HL-20 プログラムは現在は実施されていませんが、HL-20 テストから得られた空力データは現在の NASA プロジェクト [2] で使用されています。
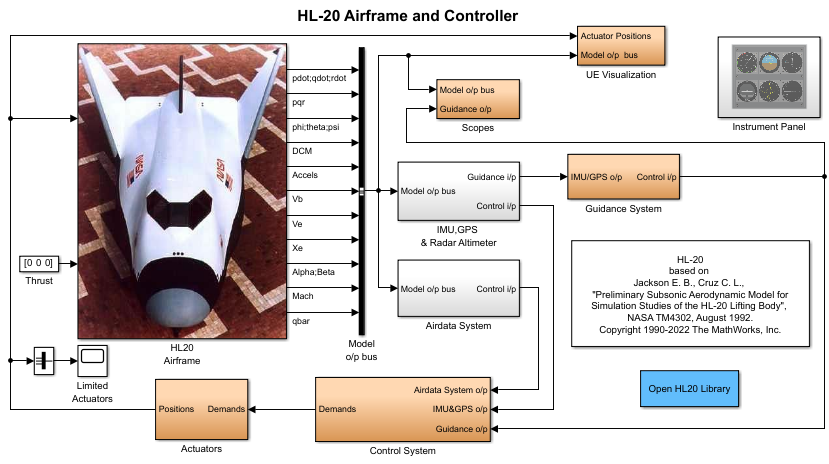
HL-20 機体とコントローラーモデル
Open HL-20 機体とコントローラー モデル。
モデリングの前提と制限
HL-20 揚力体の予備的な空力データは、NASA 文書 TM4302 [1] から取得されています。
機体モデルには、いくつかの重要な仮定と制限が組み込まれています。
モデルはミッションの無動力再突入部分のみを表しているため、機体は剛性があり、質量、重心、慣性が一定であると想定されます。
HL-20は左右対称の車両であると想定されています。
圧縮率(マッハ)の影響は無視できると想定されます。
制御の有効性は、迎え角に対しては非線形に、偏向角に対しては線形に変化するものと想定されます。制御の有効性は横滑り角に依存しません。
非線形 6 自由度空力モデルは、HL-20 の初期バージョンを表現しています。したがって、このモデルは、HL-20 の後継バージョンの現実的なパフォーマンス シミュレーションを目的としたものではありません。
典型的な機体モデルは、次のようないくつかのコンポーネントで構成されています。
運動方程式
環境モデル
空気力学的係数、力、モーメントの計算
HL-20 モデルの機体サブシステムには、一般的な機体コンポーネントをモデル化する 5 つのサブシステムが含まれています。
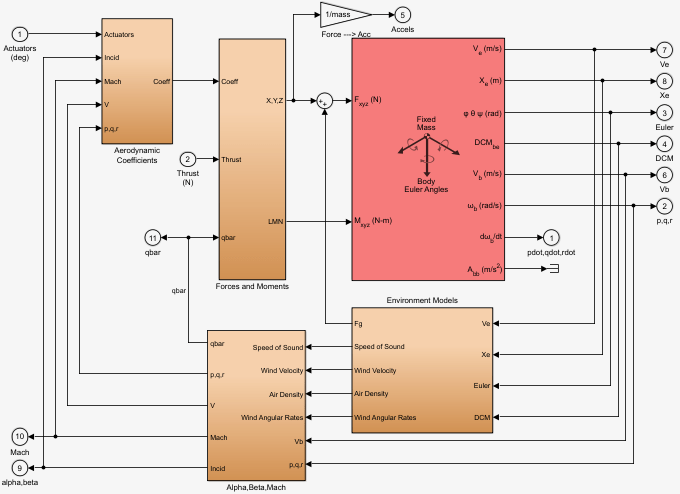
6DOF (オイラー角) サブシステム
6DOF (オイラー角) サブシステムには、機体の 6 自由度の運動方程式が含まれています。6DOF (オイラー角) サブシステムでは、オイラー角表現を使用して、ボディの姿勢が時間とともに伝播されます。このサブシステムは、Aerospace Blockset ライブラリの運動方程式ブロックの 1 つです。四元数表現も利用可能です。これらのブロックの詳細については、6DOF (Euler Angles) および 6DOF (Quaternion) ブロックのリファレンス ページを参照してください。
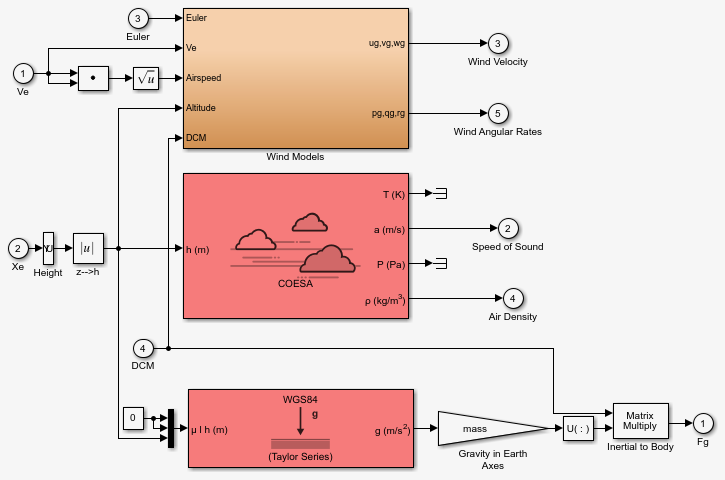
環境モデルサブシステム
環境モデル サブシステムには、次のサブシステムとブロックが含まれています。
WGS84 Gravity Model ブロックは、世界測地系 (WGS84) の地心等位楕円体の数学的表現を実装します。
このブロックの詳細については、WGS84 Gravity Model ブロックのリファレンス ページを参照してください。
COESA Atmosphere Model ブロックは、入力されたジオポテンシャル高度に基づいて、1976 年の標準大気拡張委員会 (COESA) の標準下層大気の絶対温度、圧力、密度、音速の値の数学的表現を実装します。
このブロックの詳細については、COESA Atmosphere Model ブロックのリファレンス ページを参照してください。
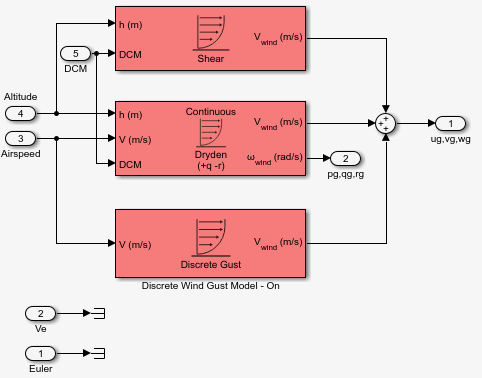
風モデル サブシステムには次のブロックが含まれています。
Wind Shear Model ブロックはモデルに風のせん断を追加します。
このブロックの詳細については、Wind Shear Model ブロックのリファレンス ページを参照してください。
Discrete Wind Gust Model ブロックは、標準の「1 - コサイン」形状の突風を実装します。
このブロックの詳細については、Discrete Wind Gust Model ブロックのリファレンス ページを参照してください。
Dryden 風乱流モデル (連続) ブロックは、Dryden スペクトル表現を使用して、帯域制限されたホワイト ノイズを適切な形成フィルターに通過させることにより、航空宇宙モデルに乱流を追加します。
このブロックの詳細については、Dryden Wind Turbulence Model (Continuous) ブロックのリファレンス ページを参照してください。
環境モデルは、1976 年の米国標準大気などの標準基準内で数学的表現を実装します。
HL-20 機体モデルの環境モデル
HL-20 機体モデルの風モデル
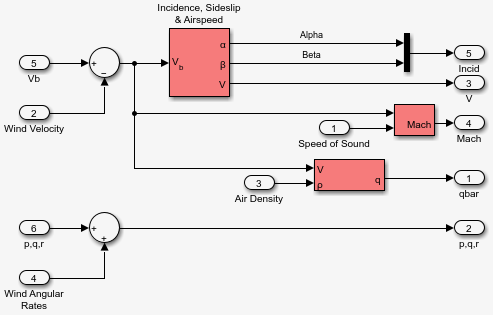
アルファ、ベータ、マッハサブシステム
Alpha、Beta、Mach サブシステムは、空力係数の計算と検索に必要な追加のパラメータを計算します。これらの追加パラメータには以下が含まれます
マッハ数
入射角 (
 )
)対気速度
動圧
Alpha、Beta、Mach サブシステムは、風速に対してボディ速度を補正し、風角加速度に対してボディ速度を補正します。
HL-20 機体モデルの追加計算パラメータ (アルファ、ベータ、マッハ サブシステム)
空力係数サブシステム
空力係数サブシステムには、参照 [1] に従って実装されている 6 つの空力係数を計算するための空力データと方程式が含まれています。6 つの空力係数は以下のとおりです。
| Cx | 軸力係数 |
| Cy | 横力係数 |
| Cz | 法線力係数 |
| Cl | 転がりモーメント係数 |
| Cm | ピッチングモーメント係数 |
| Cn | ヨーモーメント係数 |
このモデルには、地上および着陸装置の影響は含まれていません。
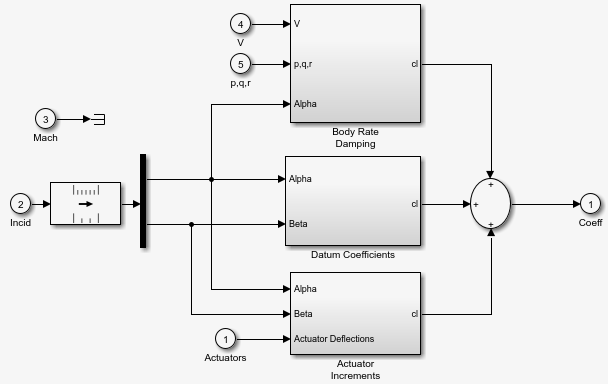
これらの各係数の寄与はサブシステム (ボディ レート、アクチュエータの増分、およびデータム) で計算され、合計されて力とモーメント サブシステムに渡されます。
HL-20 機体モデルの空力係数
空力データは、主に HL-20 の予備的な亜音速空力モデルの縮小モデルを使用した風洞試験から収集されました。データは曲線フィッティングされ、空力係数のほとんどは迎え角と横滑り角の多項式関数によって記述されます。空力データとデータ削減の詳細については、参考文献 [1] を参照してください。
aeroblk_init_hl20.m ファイルに含まれる多項式関数は、モデルのプリロード関数で使用されるルックアップ テーブルを計算するために使用されます。ルックアップ テーブルは多項式関数の代わりになります。関数の順序と実装によっては、関数を使用して各タイムステップで値を再計算するよりも、ルックアップ テーブルを使用する方が効率的になる場合があります。さらに効率を向上させるために、ほとんどのテーブルは PreLook-up ブロックを使用して PreLook-up インデックス検索および補間 (n-D) として実装されています。これらのブロックは、モデルに同一のブレークポイントを持つテーブルが多数ある場合に、パフォーマンスを最も向上させます。これらのブロックにより、モデルが特定の時間ステップでブレークポイントを検索する回数が削減されます。プリロード関数によってテーブルにデータが入力されると、空力係数を計算できます。
6 つの空力係数を計算するための方程式は、3 つのサブシステムに分割されます。
データム係数、ボディレート減衰、アクチュエータ増分サブシステムの出力を合計すると、機体の力とモーメント [1] を計算するために使用される 6 つの空力係数が生成されます。
データム係数サブシステム. データム係数サブシステムは、制御面の偏向のない基本構成の係数を計算します。これらのデータム係数は、物体の入射角のみに依存します。

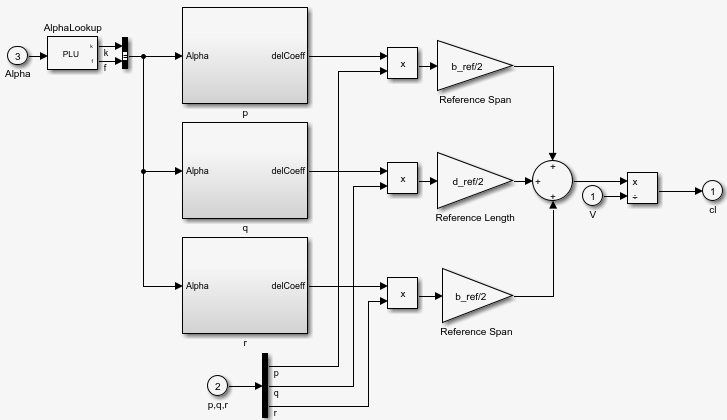
ボディレートダンピングサブシステム. 動的モーション導関数は、ボディ レート ダンピング サブシステムで計算されます。
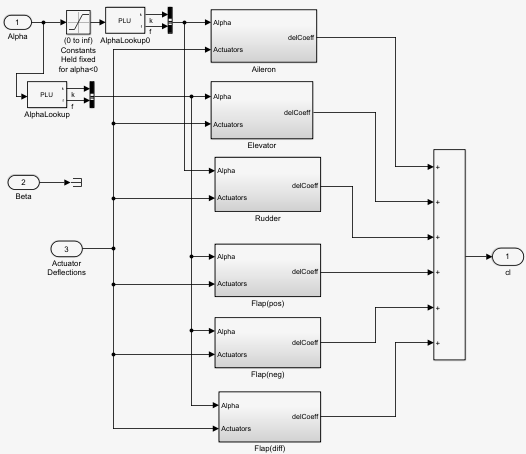
アクチュエータ増分サブシステム. ルックアップ テーブルは、アクチュエータ増分サブシステムの制御面の偏向による係数の増分変化を決定します。使用可能な操縦面には、対称翼フラップ (エレベーター)、差動翼フラップ (エルロン)、正ボディ フラップ、負ボディ フラップ、差動ボディ フラップ、および全可動ラダーが含まれます。
力とモーメントサブシステム. 力とモーメント サブシステムは、重心を中心に機体に作用する物体力と物体モーメントを計算します。これらの力とモーメントは、空力係数、推力、動圧、および基準機体パラメータによって異なります。

モデルを完成させる
調査したこれらのサブシステムにより、HL-20 の機体が完成します。飛行制御設計プロセスの次のステップは、HL-20 機体を分析、調整、線形化して、飛行制御システムを設計できるようにすることです。HL-20 機体の自動着陸飛行制御の例を見るには、MATLAB® コマンド ラインにコマンド openExample(aeroblk_HL20_UE) を入力します。
参照
[1] Jackson, E. B., and C. L. Cruz, “Preliminary Subsonic Aerodynamic Model for Simulation Studies of the HL-20 Lifting Body,” NASA TM4302 (August 1992)..
[2] Morring, F., Jr., “ISS `Lifeboat' Study Includes ELVs,” Aviation Week & Space Technology (May 20, 2002).