デラウェア大学における燃料電池ハイブリッドバス技術のシミュレーション
著者 Ajay K. Prasad, University of Delaware
デラウェア大学では、燃料電池ハイブリッドバス (FCHB) が、シャトルバスとして学生や教員を乗せて 6 マイルのキャンパス内エクスプレスルートを移動しながら、水素燃料電池技術のパワーと利点を多くの人に示しています。このバスは、ゼロエミッションでディーゼル車よりはるかに静かであること、燃料補給やメンテナンスを 1 箇所で行えるためインフラコストを削減できること、シリーズハイブリッド設計であるため都市バス路線のスタート アンド ストップ走行や比較的低速の走行に特に有効であること、などの特徴があります。
デラウェア大学の研究者は、MATLAB® および Simulink® を使用して、FCHB のモデル化、多数の車載センサーからのデータの解析、電力管理手法の改善を行い、燃料電池バス設計の最適化のための重要な洞察を得ました。
Simulink を使用すれば、試行錯誤しながらハードウェア上で反復を行って答えをみつけようとすると非常にコストがかかるような設計上の疑問点も解消できます。たとえば、燃料電池スタックのサイズを 2 倍または 3 倍にした場合にバスの性能がどうなるのかを示すシミュレーションを実行しています。他にもシミュレーションにより、搭載されているバッテリーの重量を 4,000 ポンドから 2,000 ポンドに減らしたらどうなるのかを示しています。シャシーや車両全体の重量配分の変更をシミュレーションしています。こうしたシミュレーションの結果を解析することで、特定の設計がより効率的であるかどうか、走行マイルあたりの水素消費量が少ないかどうか、またはバッテリーへのストレスが軽減されるかどうかを確認できます。その後、調査結果をバス車両製造会社である Ebus に共有できます。Ebus はこの調査結果を使用して将来の設計を改善します。
複数年にわたる複数のバスに関する研究の取り組み
FCHB プログラムは、米連邦公共交通局の資金提供を受け、デラウェア州での燃料電池バスと水素燃料補給ステーションの開発および実証を目的として、2005 年に開始されました。最初の燃料電池バスは 2007 年、2 台目は 2009 年に運用を開始しました (図 1)。このプログラムには最終的に 4 台のバスが含まれる予定で、それぞれのバスには設計の改善と前のモデルから得られた教訓が反映されます。

デラウェア大学の FCHB が、世界中でテストされている他の燃料電池バスと異なる点は、そのコストが比較的低いということです。デラウェア大学のバスのコストは、現在運行されている同等サイズの燃料電池バスよりも約 50% 低くなっています。これは主にハード シリーズ ハイブリッド設計を使用しているためです。この設計では、燃料電池は車両を直接駆動するのではなく、主にバッテリーを充電するために使用されるため、はるかに小型で安価な燃料電池を使用できます。たとえば、最初のバスの燃料電池スタックは総電力わずか 20 kW ですが、同クラスのバスは 5 倍 から 10 倍大きいスタックを使用しています。20 kW (27 馬力) の燃料電池は、芝刈り用トラクターのエンジンとほぼ同程度の電力を供給しますが、キャンパス内で数十人を輸送できます。
この燃料電池は、シリーズハイブリッド設計のバッテリーと組み合わせることで、全長 22 フィート (6.7 m) のバスに電力を供給し、着座客 22 人と立ち客 10 人を乗せて十分に走行できることが実証されました。バスは Air Liquide が運営しているキャンパス近くの水素ステーションで燃料を補給します。燃料が完全に補給され、かつフル充電の場合、バスの航続可能距離は 180 マイル (290 km) になります。
最初のバスのモデル化
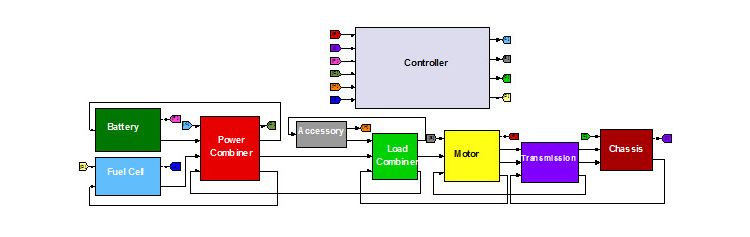
私たちは、コンソーシアム パートナーの 1 機関である Electric Power Research Institute (EPRI) が開発した Simulink ライブラリを使用して、バスとそのすべてのコンポーネントをモデル化しました。LFM (Light (軽量)、Fast (高速)、Modifiable (変更可能)) ライブラリは柔軟性があり、さまざまなハイブリッド車両プラットフォームに簡単に適用できます。Ebus から提供された設計仕様を使用して、シャシー、トランスミッション、トラクションモーター、バッテリー、燃料電池システム、パワーコンバイナーなどの主要なモデルコンポーネントのベースライン パラメーターを設定しました (図 2)。さらに、水素再循環ポンプ、エアコンプレッサー、冷却水ポンプなど、燃料電池スタックに必要なすべての補助装置を組み込んだプラントのバランスをモデル化しました。各パワートレイン コンポーネントには約 6 つの入力があり、完全なモデルでは、バッテリーの充電状態、燃料電池の出力、水素消費量、回生制動力などの 30 を超える出力が生成されます。モデルは複雑で高度ですが、各コンポーネントが Simulink ブロックとして表現されるため、システム全体ですべてのサブシステムを簡単に管理できます。
モデルの妥当性を確認するために、バスに GPS 受信機と、各運行において車内の主要な場所で電圧、電流、温度、流量、湿度を測定する 10 個以上のセンサーを装備しました。次に、Simulink で同じ運転サイクルをシミュレーションし、測定データとシミュレーション結果を比較しました。モデルの予測は車両データと 5% 以内の精度で一致しており、このモデルが信頼できる設計ツールとして使用できると確信することができました。さらに、測定データを MATLAB で解析して、性能が季節ごとおよび日ごとにどのように変化するかを把握しました。
電力管理手法の改善
ハイブリッド車両では、電力管理手法によって、どの車載発電機が特定の時点でアクティブになり、どのようなレートで電力を生成するかが決まります。最初のバスには、かなり基本的な電力管理手法が使用されていました。バッテリーの充電状態が 65% を下回ると、システムは燃料電池を有効にしてバッテリーの再充電を開始していました。システムが最大電力を即時に要求した場合、燃料電池によって供給されていましたが、最適な動作領域外にあるため、効率的ではありませんでした。最初の目標の 1 つは、この手法を改善することでした。
MATLAB と Simulink を使用して、燃料電池スタックをピーク効率点でより一貫して動作させ続けるよう計画されたルートに関する知識を取り込んだ、電力管理手法を評価しました。MATLAB を使用すると、複数のシミュレーション実行のスクリプトを作成し、実行ごとにモデルの手法やその他の側面の変更を容易に行えます。このアプローチを使用して、性能と効率の最適な組み合わせを生み出す手法を特定しました。次に、オンボードのプログラマブル ロジック コントローラー (PLC) を更新することでその手法を実装しました。シミュレーションにより、毎日の運転サイクル内で燃料電池をアクティブにする最適な時間を特定したことで、燃料電池とバッテリーを組み合わせた出力が残りの運行に関する車両のニーズを満たし、ニッケル カドミウム バッテリーを作動させて水素を節約できるようにしました。
2 台目のバスの改善点
性能を向上させる方法を特定するうえで、感度解析が重要な役割を果たしました。パワートレインの各主要コンポーネントのパラメーターは、将来の設計で変更可能です。Simulink モデルでこれらのパラメーターをプログラムによって変更し、現在の値の -30% から +30% までスイープする MATLAB スクリプトを開発しました。次に、こうしたスクリプトを複数のパラメーターに対して自動的に実行しました。シミュレーションが完了すると、蓄積した大量のデータを MATLAB を使用して解析し、性能に最も影響を与えるパラメーターを特定してプロットしました。
バス車両製造会社がシリーズ 2 台目のバスの設計と構築を開始したとき、既に主要な性能パラメーター、燃料電池とバッテリーのダイナミクス、および燃料電池とバッテリーが運転サイクル全体でどのように動作するかについて多くのことがわかっていました。シミュレーションは、燃料電池スタックのサイズを約 40 kW に倍増するというバス車両製造会社の決定の妥当性を確認するのに役立ちました (図 3)。

この変更によってバッテリー容量を削減できますが、新しいパッケージに必要な再設計を避けるために、同じニッケル カドミウム バッテリー パッケージを使用することにしました。燃料電池スタックを 2 倍にすることで、バスの平均運行速度が 18 mph から 35 mph に上がりました。これは、Simulink シミュレーションで予測された結果と一致しました。また、この変更により、バスはより要求の厳しい交通ルートを走破したり、最低速度を上げる必要がある道路を使用したりできるようになりました。
バスには、デラウェア大学で設計および製造された革新的な電池電圧監視 (CVM) システムが装備されています。このシステムを使用すると、スタック内の 100 個を超える個々の電池で異常に低い電圧や高い電圧を検出できるため、燃料電池スタックの詳細を非常に細かいレベルで把握できます。CVM システムはこれらの電圧を 1 秒ごとに 1 回スキャンして記録します。研究室のサーバーにデータを送信するセルラーリンクを介して結果をリアルタイムで監視したり、記録された測定値を後で解析したりできます。そこで、データ収集、解析、可視化用のソフトウェアとして MATLAB を選択しました。
3 台目以降のバス
3 台目のバスには、大幅な設計変更が組み込まれています。2 台目のバスと同様に、40kW の燃料電池スタックを搭載しますが、ニッケル カドミウム バッテリーからリチウムイオンに切り替えます。これにより、バッテリーパッケージの重量が 4,000 ポンドから約 1,500 ポンドに削減されます。リチウムイオン バッテリーは寿命が長く、充放電をより高速かつ頻繁に行えるため、Simulink で新しい電力管理手法を探索できるようになります。性能の向上により、パワートレインはより大型のバスをより速い持続速度で駆動できるようになります。3 台目のバスと 4 台目のバスは全長 30 フィートで、22 フィートのバスよりも最大で 10 人多くの乗客を乗せて走行します。
現在進行中の研究の一環として、大学院生の一人が最近、燃料電池とバッテリーを組み合わせた貯蔵システムにおけるスーパーコンデンサの使用を検討する論文を完成させました。Simulink でスーパーコンデンサをモデル化し、それを FCHB モデルに組み込んで、スーパーコンデンサの急速充放電特性を利用する高度な電力管理手法をシミュレーションおよびテストしました。この研究は、この分野における Simulink の価値を示す優れた例です。この種のアイデアを実際のハードウェアで探索するには、考えられないほどのコストと時間がかかるでしょう。Simulink は探索を可能にするだけでなく、非常に信頼性の高い結果が得られます。その大学院生はその後、カリフォルニアの燃料電池バス会社に就職し、FCHB プログラムで得た経験を活かしています。
研究者および教員として、FCHB プログラムは非常に満足のいくものであると感じています。大学院生は素晴らしい成果を上げており、バスがキャンパスを走行するのを見ると、シミュレーションがバスの性能の向上にどれほど大きく貢献したのかがわかります。学術的な実習がこれほどすぐに実践的な価値を生み出すことは多くはありません。
FCHB の基礎
水素燃料電池は、内燃エンジンよりも 2 から 3 倍効率的です。これが普及するにつれて、化石燃料への依存が減ります。燃料電池では、水素と酸素が電気化学反応で結合し、電気と、副産物として水が生成されます。(この水を解析したところ、飲用できるほど純度が高いことがわかりました。)もう 1 つの車載電源はニッケル カドミウム バッテリー パックで、夜間に充電されます。このバッテリーパックは車輪に牽引動力を供給します。また、ブレーキ時には車輪から回生電力を受け取ります。このゼロエミッションのハイブリッド ドライブ システムは、ディーゼルエンジンよりもはるかにクリーンかつ静かで、排気には煤や発がん性物質が含まれていません。
公開年 2011 - 91895v00