このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
vision.HistogramBasedTracker
ヒストグラムベースのオブジェクト追跡
説明
ヒストグラムベースのトラッカーには、オブジェクト追跡用の CAMShift (continuously adaptive mean shift) アルゴリズムが組み込まれています。ピクセル値のヒストグラムを使用して、追跡されるオブジェクトを識別します。
オブジェクトを追跡するには、次を行います。
vision.HistogramBasedTrackerオブジェクトを作成し、そのプロパティを設定します。関数と同様に、引数を指定してオブジェクトを呼び出します。
System object の機能の詳細については、System object とはを参照してください。
作成
説明
hbtracker = vision.HistogramBasedTrackerinitializeObject を使用して、オブジェクトの見本イメージを指定しなければなりません。
hbtracker = vision.HistogramBasedTracker(Name,Value)hbtracker = vision.HistogramBasedTracker('ObjectHistogram',[])
プロパティ
使用法
説明
bbox = hbtracker(I)initializeObject を使用します。
[ はさらに、x 軸と、オブジェクトと同じ 2 次モーメントをもつ楕円の長軸との角度を返します。返される角度は –pi/2 ~ pi/2 になります。bbox,orientation] = hbtracker(I)
[ はさらに、追跡されるオブジェクトを含む、返される境界ボックスの信頼度スコアを返します。 bbox,orientation,score] = hbtracker(I)
入力引数
出力引数
オブジェクト関数
オブジェクト関数を使用するには、System object™ を最初の入力引数として指定します。たとえば、obj という名前の System object のシステム リソースを解放するには、次の構文を使用します。
release(obj)
例
入力ビデオの各フレームで顔を追跡して表示します。
ビデオの読み取りと表示を行う System object を作成します。
videoReader = VideoReader("vipcolorsegmentation.avi");
videoPlayer = vision.VideoPlayer();
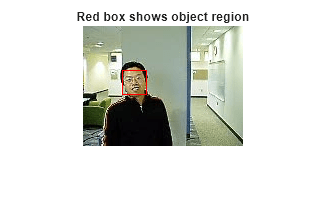
オブジェクトを含む最初のビデオ フレームを読み取ります。イメージを HSV 色空間に変換します。次に、オブジェクト領域を定義して表示します。
objectFrame = im2single(readFrame(videoReader)); objectHSV = rgb2hsv(objectFrame); objectRegion = [40, 45, 25, 25]; objectImage = insertShape(objectFrame,"rectangle",objectRegion,Color=[1 0 0]); figure imshow(objectImage) title("Red box shows object region")
(オプションとして、マウスを使用してオブジェクト領域を選択できます。オブジェクトは領域の大部分を占めていなければなりません。次のコマンドを使用します。)
figure; imshow(objectFrame); objectRegion=round(getPosition(imrect))
最初のビデオ フレームの色相チャネルに基づいてオブジェクトを設定します。
tracker = vision.HistogramBasedTracker; initializeObject(tracker, objectHSV(:,:,1) , objectRegion);
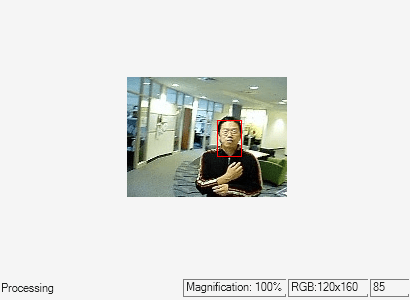
各ビデオ フレームでオブジェクトを追跡して表示します。while ループでは、各イメージ フレームを読み取り、イメージを HSV 色空間に変換してから、背景とは異なる色相チャネルでオブジェクトを追跡します。例では最後に、オブジェクトの周りにボックスを描画し、結果を表示します。
while hasFrame(videoReader) frame = im2single(readFrame(videoReader)); hsv = rgb2hsv(frame); bbox = tracker(hsv(:,:,1)); out = insertShape(frame,"rectangle",bbox,Color=[1 0 0]); videoPlayer(out); end

ビデオ プレーヤーを解放します。
release(videoPlayer);
参照
[1] Bradsky, G.R. "Computer Vision Face Tracking For Use in a Perceptual User Interface." Intel Technology Journal. January 1998.
拡張機能
バージョン履歴
R2012a で導入