procrustes
プロクラステス解析
構文
説明
d = procrustes(X,Y,Name,Value)
例
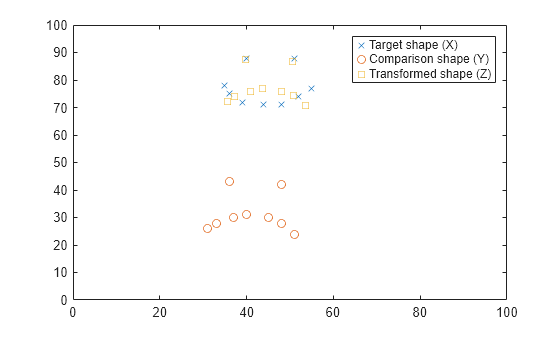
2 つの形状のランドマーク点を含む行列を作成し、それらのランドマーク点をプロットして形状を可視化します。
X = [40 88; 51 88; 35 78; 36 75; 39 72; 44 71; 48 71; 52 74; 55 77]; Y = [36 43; 48 42; 31 26; 33 28; 37 30; 40 31; 45 30; 48 28; 51 24]; plot(X(:,1),X(:,2),"x") hold on plot(Y(:,1),Y(:,2),"o") xlim([0 100]) ylim([0 100]) legend("Target shape (X)","Comparison shape (Y)")

形状を比較してそれらのプロクラステス距離を表示します。
[d,Z] = procrustes(X,Y)
d = 0.2026
Z = 9×2
39.7694 87.5089
50.5616 86.8011
35.5487 72.1631
37.3131 73.9909
40.8735 75.8503
43.5517 76.7959
48.0577 75.9771
50.7835 74.2286
53.5410 70.6841
Y を X に重ね合わせることで得られる形状を可視化します。
plot(Z(:,1),Z(:,2),"s") legend("Target shape (X)","Comparison shape (Y)", ... "Transformed shape (Z)") hold off
procrustes によって返されるプロクラステス変換を使用して、比較形状がターゲット形状にどのように重ね合わさるかを解析します。
2 次元の標本データを生成します。
rng("default")
n = 10;
Y = normrnd(0,1,[n 2]);Y を 60 度 (ラジアン単位で pi/3) 回転し、Y のサイズを係数 0.5 でスケーリングし、2 を追加して点を平行移動することで、ターゲット形状 X を作成します。また、X のランドマーク点にノイズを追加します。
S = [cos(pi/3) -sin(pi/3); sin(pi/3) cos(pi/3)]
S = 2×2
0.5000 -0.8660
0.8660 0.5000
X = normrnd(0.5*Y*S+2,0.05,n,2);
Y を X に変換できるプロクラステス変換を求めます。
[~,Z,transform] = procrustes(X,Y);
プロクラステス変換の成分を表示します。
transform
transform = struct with fields:
T: [2×2 double]
b: 0.4845
c: [10×2 double]
transform.T
ans = 2×2
0.4832 -0.8755
0.8755 0.4832
transform.c
ans = 10×2
2.0325 1.9836
2.0325 1.9836
2.0325 1.9836
2.0325 1.9836
2.0325 1.9836
2.0325 1.9836
2.0325 1.9836
2.0325 1.9836
2.0325 1.9836
2.0325 1.9836
transform.T は行列 S に似ています。また、スケール成分 (transform.b) は 0.5 に近く、平行移動成分値 (transform.c) は 2 に近くなっています。
transform.T の行列式を計算して、transform.T が回転を示すか反射を示すかを判定します。回転行列の行列式は 1 で、反射行列の行列式は –1 です。
det(transform.T)
ans = 1.0000
2 次元平面では、原点を中心に 度の角度だけ点を回転する回転行列は、次のような形式になります。
.
または を使用する場合、回転角には –180 ~ 180 の範囲の値を 2 つ使用できます。 と の両方の値を使用して、あいまいさがない行列の回転角を特定します。関数atan2dを使用して、 と から 値を特定できるほか、角度も特定できます。
theta = atan2d(transform.T(2,1),transform.T(1,1))
theta = 61.1037
transform.T は 61 度の回転行列です。
procrustes によって返されるプロクラステス変換を使用して、比較形状がターゲット形状にどのように重ね合わさるかを解析します。
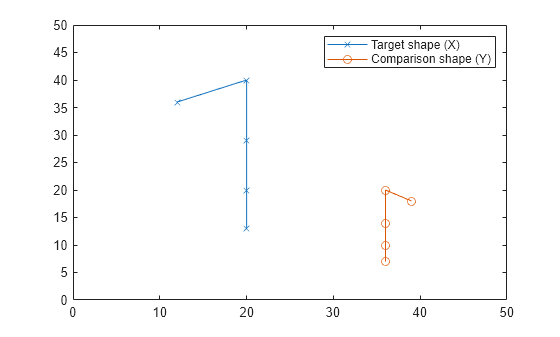
2 つの異なる形状のランドマーク点をもつ行列を作成します。
X = [20 13; 20 20; 20, 29; 20 40; 12 36]; Y = [36 7; 36 10; 36 14; 36 20; 39 18];
ランドマーク点をプロットして形状を可視化します。
plot(X(:,1),X(:,2),"-x") hold on plot(Y(:,1),Y(:,2),"-o") xlim([0 50]) ylim([0 50]) legend("Target shape (X)","Comparison shape (Y)") hold off
procrustes を使用してプロクラステス変換を取得します。
[d,Z,transform] = procrustes(X,Y)
d = 0.0064
Z = 5×2
20.1177 13.3935
19.9145 19.6790
19.6435 28.0597
19.2371 40.6306
13.0871 36.2371
transform = struct with fields:
T: [2×2 double]
b: 2.0963
c: [5×2 double]
transform.T
ans = 2×2
-0.9995 -0.0323
-0.0323 0.9995
transform.c
ans = 5×2
96.0177 1.1661
96.0177 1.1661
96.0177 1.1661
96.0177 1.1661
96.0177 1.1661
変換のスケール成分 b は、X のスケールが Y のスケールの約 2 倍であることを示しています。
変換の回転成分と反射成分の行列式を求めます。
det(transform.T)
ans = -1.0000
行列式は –1 です。つまり、変換に反射が含まれています。
2 次元平面では、反射行列は次のような形式になります。
,
これは、"x" 軸と角度 をなす線に関する反射を示します。
または を使用する場合、反射線の角度には –90 ~ 90 の範囲の値を 2 つ使用できます。 と の両方の値を使用して、あいまいさがない反射線の角度を特定します。関数atan2dを使用して、 と から 値を特定できるほか、角度も特定できます。
theta = atan2d(transform.T(2,1),transform.T(1,1))/2
theta = -89.0741
transform.T は、"x" 軸と約 –90 度の角度をなす線に関して点を鏡映します。この線は "y" 軸を示します。X と Y のプロットは、Y を X に重ね合わせるには "y" 軸に関する鏡映が必要であることを示しています。
ランドマーク点のプロクラステス変換を求め、その変換をランドマーク点よりも多い比較形状の点に適用します。
2 つの三角形 X (ターゲット形状) および Y (比較形状) のランドマーク点をもつ行列を作成します。
X = [5 0; 5 5; 8 5]; Y = [0 0; 1 0; 1 1];
三角形 Y の点の数を増やした行列を作成します。
Y_points = [linspace(Y(1,1),Y(2,1),10)' linspace(Y(1,2),Y(2,2),10)'
linspace(Y(2,1),Y(3,1),10)' linspace(Y(2,2),Y(3,2),10)'
linspace(Y(3,1),Y(1,1),10)' linspace(Y(3,2),Y(1,2),10)'];数を増やした比較形状の点集合を含む両方の形状をプロットします。
plot([X(:,1); X(1,1)],[X(:,2); X(1,2)],"bx-") hold on plot([Y(:,1); Y(1,1)],[Y(:,2); Y(1,2)],"ro-","MarkerFaceColor","r") plot(Y_points(:,1),Y_points(:,2),"ro") xlim([-1 10]) ylim([-1 6]) legend("Target shape (X)","Comparison shape (Y)", ... "Additional points on Y","Location","northwest")

procrustes を呼び出して、比較形状からターゲット形状へのプロクラステス変換を取得します。
[d,Z,transform] = procrustes(X,Y)
d = 0.0441
Z = 3×2
5.0000 0.5000
4.5000 4.5000
8.5000 5.0000
transform = struct with fields:
T: [2×2 double]
b: 4.0311
c: [3×2 double]
プロクラステス変換を使用して、比較形状の他の点 (Y_points) をターゲット形状に重ね合わせ、結果を可視化します。
Z_points = transform.b*Y_points*transform.T + transform.c(1,:); plot([Z(:,1); Z(1,1)],[Z(:,2); Z(1,2)],"ks-","MarkerFaceColor","k") plot(Z_points(:,1),Z_points(:,2),"ks") legend("Target shape (X)","Comparison shape (Y)", ... "Additional points on Y","Transformed shape (Z)", ... "Transformed additional points","Location","best") hold off

ランドマーク点を使用して手書き文字 d および b の形状を作成し、点をプロットして文字を可視化します。
D = [33 93; 33 87; 33 80; 31 72; 32 65; 32 58; 30 72;
28 72; 25 69; 22 64; 23 59; 26 57; 30 57];
B = [48 83; 48 77; 48 70; 48 65; 49 59; 49 56; 50 66;
52 66; 56 65; 58 61; 57 57; 54 56; 51 55];
plot(D(:,1),D(:,2),"x-")
hold on
plot(B(:,1),B(:,2),"o-")
legend("Target shape (d)","Comparison shape (b)")
hold off
procrustes を使用して反射をオフにした状態で文字を比較します。反射を行うと b が d になり、比較する形状が正確に保持されないためです。
d = procrustes(D,B,"reflection",false)d = 0.3425
反射をオンにした状態で procrustes を使用してみて、プロクラステス距離の違いを確認します。
d = procrustes(D,B,"reflection","best")
d = 0.0204
b を反射すると d とうまく合致するため、この反射設定によりプロクラステス距離は小さくなります。
ランドマーク点で表される 2 つの形状を作成し、点をプロットして可視化します。
X = [20 13; 20 20; 20 29; 20 40; 12 36]; Y = [36 7; 36 10; 36 14; 36 20; 39 18]; plot(X(:,1),X(:,2),"-x") hold on plot(Y(:,1),Y(:,2),"-o") xlim([0 50]) ylim([0 50]) legend("Target shape (X)","Comparison shape (Y)")

プロクラステス解析を使用してスケーリングをオフにした状態で 2 つの形状を比較します。
[d,Z] = procrustes(X,Y,"scaling",false)d = 0.2781
Z = 5×2
19.2194 20.8229
19.1225 23.8214
18.9932 27.8193
18.7993 33.8162
15.8655 31.7202
重ね合わせたランドマーク点を可視化します。
plot(Z(:,1),Z(:,2),"-s") legend("Target shape (X)","Comparison shape (Y)", ... "Transformed shape (Z)") hold off

重ね合わせた形状 Z のスケールは元の形状 Y と同じです。
入力引数
名前と値の引数
出力引数
詳細
ヒント
プロクラステス解析は、
XとYのすべての次元が同様なスケールをもっている際に適切です。XとYの列のスケールが異なる場合は、zscoreまたはnormalizeを使用して列を標準化します。プロクラステス解析は多次元尺度構成法と併用できます。多次元尺度構成法を別個に適用することで、原則的に類似しているが、向きが違うために異なって見える再構成された点が生成される場合があります。また、再構成された点の向きは元の点とは異なる場合があります。関数
procrustesは点集合を変換して、他と比較しやすくします。例については、非空間的距離に適用した古典的多次元尺度構成法を参照してください。
参照
[1] Kendall, David G. “A Survey of the Statistical Theory of Shape.” Statistical Science. Vol. 4, No. 2, 1989, pp. 87–99.
[2] Bookstein, Fred L. Morphometric Tools for Landmark Data. Cambridge, UK: Cambridge University Press, 1991.
[3] Seber, G. A. F. Multivariate Observations. Hoboken, NJ: John Wiley & Sons, Inc., 1984.
バージョン履歴
R2006a より前に導入