単純な振子のモデル化
振子は、モデル化できる最も単純な機械システムです。このシステムには、リンクと固定ピボットという 2 つのボディが回転ジョイントにより接続された状態で含まれています。この例では、単純なリンクのモデル化で作成したカスタム リンク ブロックを使用して、振子のモデル化とシミュレーションの方法を学びます。Revolute Joint ブロックは、リンクとワールド フレームで固定されたピボットの間に回転自由度を与えます。

モデルの作成
MATLAB® コマンド プロンプトで「
smnew」と入力します。よく使用されるブロックを含む Simscape™ Multibody™ モデル テンプレートが開きます。Simulink-PS Converter、PS-Simulink Converter、Scope、および Rigid Transform のブロックを削除します。この例では、これらは必要ありません。
単純なリンクのモデル化で作成した Simple Link カスタム ブロックをモデルに追加します。
Revolute Joint ブロックをモデルに追加します。このブロックは、[Simscape] 、 [Multibody] 、 [Joints] ライブラリにあります。このブロックは、そのフレーム間に回転自由度 1 を与えます。
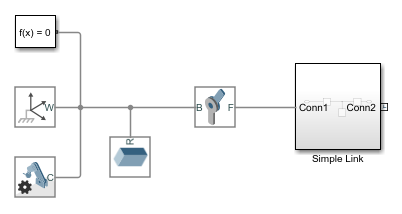
次の図のようにブロックを接続します。Revolute Joint ブロックの端子の向きは、ジョイントの状態ターゲットの指定、ジョイントの作動入力の指定またはジョイントの動的変数の検出に際して重要になります。Revolute Joint ブロックでは、base フレームとの関連で follower フレームに適用されるものとしてそれぞれの量が解釈されるため、端子の接続を切り替えると、モデル アセンブリとシミュレーションが影響を受ける場合があります。
Brick Solid ブロックのダイアログ ボックスで、以下のパラメーターを指定します。このブロックはワールド フレームに剛結合されているため、マルチボディ モデルのダイナミクスに影響を与えません。マルチボディ ダイナミクスのシミュレーションの詳細については、マルチボディ モデリングを参照してください。慣性パラメーターは既定値のままでかまいません。
パラメーター 値 単位 [Geometry] 、 [Dimensions] [4 4 4]cm[Graphic] 、 [Visual Properties] 、 [Color] [0.80 0.45 0]N/A
重力の指定
Revolute Joint ブロックでは、base フレームと follower フレームに共通する Z 軸をジョイントの回転軸として使用します。振子が重力の影響下で必ず振れるように、Z 軸と方向が揃わなくなるよう重力ベクトルを変更します。これを行うには、Mechanism Configuration ブロックのダイアログ ボックスで、[Uniform Gravity] 、 [Gravity] を [0 -9.81 0] に設定します。
振子の開始位置の設定
Revolute Joint ブロックのダイアログ ボックスで [State Targets] メニューを使用して、望ましいジョイント角度を指定することができます。これを行うには、[State Targets] 、 [Specify Position Target] を選択して、[value] パラメーターに望ましいジョイント角度を入力します。このチュートリアルでは、角度を既定値のままにしておいてかまいません。これは、振子の水平開始位置に対応します。
ソルバーの構成
[コンフィギュレーション パラメーター] を開きます。[モデル化] タブで、[モデル設定] をクリックします。
[ソルバー] タブで、[ソルバー] パラメーターを
[ode15s (stiff/NDF)]に設定します。このソルバーは、物理モデル用に推奨される選択肢です。[最大ステップ サイズ] を
0.01に設定し、[OK] をクリックします。ステップ サイズを小さくすることでシミュレーションの正確性が向上し、より滑らかなアニメーションが Multibody Explorer で生成されます。ステップ サイズが小さいと、シミュレーション速度に悪影響が及ぶ場合がありますが、このような単純なモデルでは、0.01という値によってシミュレーションの速度と正確性の間で良好なバランスがとれます。
モデルの組み立て
ブロック線図を更新します。[モデル化] タブで、[モデルの更新] をクリックします。Multibody Explorer が開き、モデルの 3 次元表示が初期構成で提示されます。
[Multibody Explorer] ツールストリップで、[View convention] パラメーターが [Y up (XY Front)] に設定されていることを確認します。このビュー規則によって、重力の向きは画面上で必ず垂直方向に合わせられます。標準ビュー ボタンを選択して、Multibody Explorer の表示を更新します。次の図は、モデルの正面図を示しています。[Save explorer configuration to model] ボタン  をクリックして、可視化設定を保存します。
をクリックして、可視化設定を保存します。

モデルのシミュレーション
シミュレーションを実行します。Multibody Explorer は、振子モデルの物理学に基づくアニメーションを再生します。
モデルの保存
モデルを SimplePendulum という名前で任意のフォルダーに保存します。このモデルは、チュートリアル単振子の解析で再利用します。
参考
Revolute Joint | Prismatic Joint