Simscape モデルの定常状態の操作点の検出
Simulink® Control Design™ ソフトウェアを使用して、Simscape™ コンポーネントをもつモデルの操作点を検出できます。具体的には、次のいずれかの方法を用いて定常状態の操作点を見つけることができます。
最適化ベースの平衡化 — モデルの入力、出力、状態に対する制約を指定して、これらの制約を満たす定常状態の操作点を計算します。詳細については、定常状態の操作点の計算を参照してください。
既定では、モデル内の任意の Simulink および Simscape の状態と、モデルの任意のルートレベルの入出力端子に操作点仕様を定義できます。また、Simulink 信号に追加の出力仕様を定義することもできます。Simscape の物理量信号に出力仕様を適用するには、まず PS-Simulink Converter (Simscape) ブロックを使用して信号を変換します。
シミュレーションのスナップショット — 予期される平衡点の近くにモデルの初期条件を指定して、モデルを定常状態に達するまでシミュレートします。その後、モデルの定常状態信号と状態に基づいて操作点を作成できます。詳細については、シミュレーションのスナップショットでの操作点の検出を参照してください。
周期的操作点探索 — PWM 信号によって駆動されるパワー エレクトロニクス回路など、周期的に駆動されるか、自己発振するスイッチング システムの場合、モデル内の周期信号の既知の周期と信号収束許容誤差を指定します。該当する信号を監視して、周期的な定常状態にあるかどうかを判別します。この手法は、シミュレーションのスナップショットを使用するよりも効率性と信頼性が高くなります。詳細については、Find Periodic Operating Point for Switching Boost Converter Modelを参照してください。
投影ベースの平衡化オプティマイザー
Simscape モデルの平衡化の結果を改善するには、投影ベースの平衡化オプティマイザーを使用できます。これらのオプティマイザーは、目的関数または非線形制約関数の評価ごとにモデルの初期条件の一貫性を強制的に適用します。投影ベースの平衡化オプティマイザーを使用するには Optimization Toolbox™ ソフトウェアが必要です。
これらの投影ベースのオプティマイザーは、コマンド ラインまたはモデル線形化器を使用してモデルを平衡化する際に使用できます。
コマンド ラインでオプティマイザーのタイプを指定するには、findopOptions オプション セットを作成して Optimizer オプションを次のいずれかに指定します。
"lsqnonlin-proj"— 関数の許容誤差を投影した非線形最小二乗"graddescent-proj"— 関数の許容誤差を投影した勾配降下
関数の許容誤差を投影した勾配降下をコマンド ラインで使用する場合、アルゴリズムがモデルの初期条件を強制する際に厳密な制約と柔軟な制約のどちらを使用するかを findopOptions の ConstraintType オプションで指定できます。
オプティマイザー タイプを指定するには次を行います。
定常状態マネージャーで、[平衡化オプション] ダイアログ ボックスを開きます。[仕様] タブで、[平衡化オプション] をクリックします。
モデル線形化器で、まず [モデルの平衡化] ダイアログ ボックスを開きます。[線形解析] タブの [操作点] ドロップダウン リストで、
[モデルの平衡化]を選択します。次に、[オプション] タブを選択します。
[最適化手法] ドロップダウン リストで、オプティマイザーを選択します。
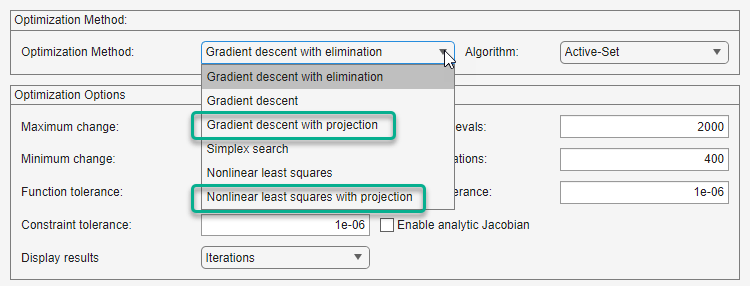
関数の許容誤差を投影した勾配降下を定常状態マネージャーまたはモデル線形化器で使用する場合、アルゴリズムは厳密な制約を使用してモデルの初期条件を強制します。
投影ベースの平衡化の最適化を使用する例は、投影ベースの平衡化オプティマイザーを使用した定常状態のシミュレーションを参照してください。
参考
アプリ
関数
ブロック
- PS-Simulink Converter (Simscape)