制御システム デザイナーの調整法
制御システム デザイナーを使用して、各種のグラフィカルな調整法や自動調整法により補償器を調整することができます。
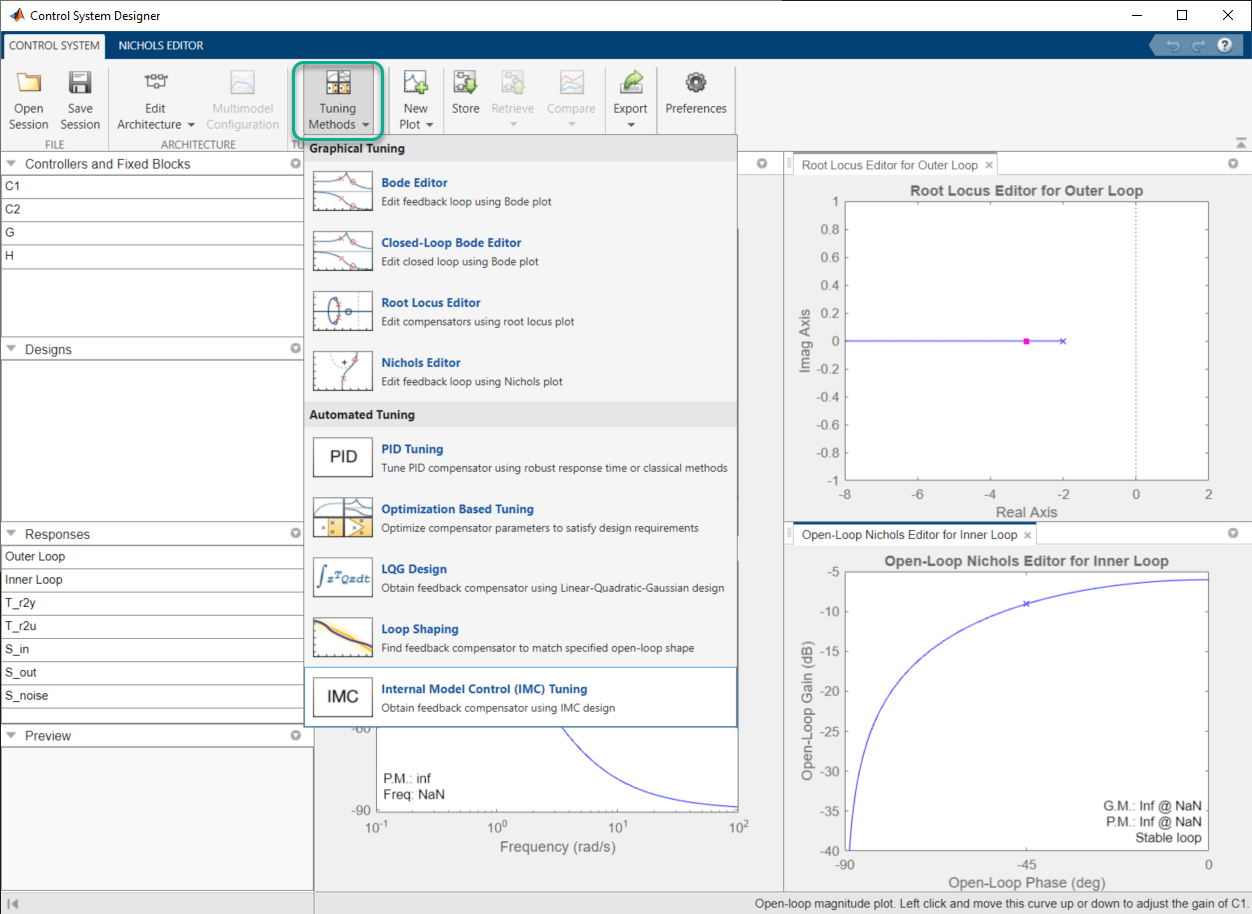
グラフィカルな調整法
グラフィカルな調整法を使用して、コントローラーの極、零点およびゲインを対話形式で追加し、変更し、削除します。
| 調整法 | 説明 | 有効な使用対象 |
|---|---|---|
| ボード エディター | 特定の開ループ周波数応答が得られるよう補償器を調整する (ループ整形)。 | 開ループ帯域幅の調整、およびゲイン余裕と位相余裕の仕様に合わせた設計。 |
| 閉ループ ボード エディター | 閉ループ システム応答が改善されるようプレフィルターを調整する。 | 設定値追従、入力外乱の抑制、ノイズ除去の改善。 |
| 根軌跡エディター | 設計仕様を満たす閉ループの極の位置が得られるよう補償器を調整する。 | 最大オーバーシュートや整定時間など、時間領域の設計仕様に合わせた設計。 |
| ニコルス エディター | ニコルス線図でゲインと位相の情報を組み合わせ、特定の開ループ応答が得られるよう補償器を調整する (ループ整形)。 | 開ループ帯域幅の調整、およびゲイン余裕と位相余裕の仕様に合わせた設計。 |
グラフィカルな調整を使用する場合、補償器をエディター プロットから直接変更するか、補償器エディターを使って変更することができます。一般的な設計法では、エディター プロットで補償器を大まかに調整してから、補償器エディターを使って補償器のパラメーターを微調整します。詳細については、制御システム デザイナーでの補償器のダイナミクスの編集を参照してください。
グラフィカルな調整法は相互に排他的ではありません。たとえば、ボード エディターと根軌跡エディターの両方を同時に使用して補償器を調整できます。このオプションは、時間領域と周波数領域の両方の仕様に合わせて設計を行うときに役立ちます。
グラフィカルな調整の例は、以下を参照してください。
自動調整法
自動調整法を使用して、補償器を設計仕様に基づいて自動的に調整します。
| 調整法 | 説明 | 要件と制限 |
|---|---|---|
| PID 調整 | PID ゲインを自動的に調整して性能とロバスト性のバランスを取るか、古典 PID 調整公式を使ってコントローラーを調整する。 | 古典 PID 調整公式には、安定したプラントまたは効果的な積分プラントが必要。 |
| 最適化ベースの調整 | グラフィカルな調整プロットと解析プロットで指定されている設計要件を使用して、補償器のパラメーターを最適化する。 | Simulink® Design Optimization™ ソフトウェアが必要。 先に定義されているコントローラー構造のパラメーターを調整する。 |
| LQG 合成 | 線形 2 次ガウシアン (LQG) トラッカーとして、最大次数の安定化フィードバック コントローラーを設計する。 | コントローラーの最大次数は、効果的なプラントのダイナミクスによって決まる。 |
| ループ整形 | 指定された開ループ帯域幅または形状を含む最大次数の安定化フィードバック コントローラーを見つける。 | Robust Control Toolbox™ ソフトウェアが必要。 コントローラーの最大次数は、効果的なプラントのダイナミクスによって決まる。 |
| 内部モデル コントロール (IMC) の調整 | IMC 設計法を使用して、最大次数の安定化フィードバック コントローラーを取得する。 | 制御システムが、プラントのダイナミクスの予測モデルを含む IMC アーキテクチャを使用していることを仮定する。 コントローラーの最大次数は、効果的なプラントのダイナミクスによって決まる。 |
一般的な設計法では、PID 調整、LQG 合成、ループ整形または IMC 調整を使用して、初期の補償器を生成します。その後、最適化ベースの調整またはグラフィカルな調整を使用して、補償器の性能を改善できます。
自動調整法の詳細については、自動調整法を使用した補償器の設計を参照してください。
調整のための効果的なプラント
"効果的なプラント" とは補償器によって制御されるシステムであり、調整している補償器以外の、モデルにある開ループのすべての要素を含みます。次の図は効果的なプラントの例を示しています。
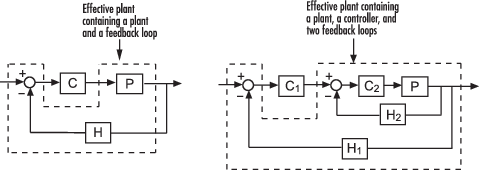
効果的なプラントのプロパティを補償器との関連で知っておくと、システムでどの調整法が機能するかを把握するのに役立ちます。たとえば、一部の自動調整法は、開ループ () に安定した効果的なプラント () がある補償器のみに適用されます。また、IMC やループ整形のような調整法では、コントローラーの最大次数が効果的なプラントのダイナミクスによって決まります。
Simulink 内の補償器の調整
Simulink モデル内の補償器に、その極、零点またはゲインに対する制約がある場合、LQG 合成、ループ整形、および IMC 調整は使用できません。たとえば、これらの方法を使っても PID Controller ブロックのパラメーターは調整できません。アプリケーションでコントローラーの制約を必要とする場合は、代替の自動調整法かグラフィカルな調整法を使用してください。
また、Simulink モデル内の補償器に何らかの制約があると、調整された補償器の構造は制限されます。たとえば、PID 調整を使用していて PID Controller ブロックを PI コントローラーとして構成する場合、調整された補償器は 0 の微分係数パラメーターをもたなければなりません。
調整法の選択
調整法を選択するには、制御システム デザイナーで [調整法] をクリックします。