外乱補償
入力と出力に基づいてプラントの状態と外乱を推定できる推定手法を使用します。
ブロック
| Active Disturbance Rejection Control | 不明なダイナミクスおよび外乱があるプラント用のコントローラーを設計する (R2022b 以降) |
| Extended State Observer | Estimate states and disturbances of a system (R2024a 以降) |
| Disturbance Compensator | Modify control actions to compensate for unknown dynamics and disturbances (R2024a 以降) |
| Ultra Local Model | Estimate nonlinear plant as single or double integrator systems with an affine term that captures unknown dynamics and disturbances (R2025a 以降) |
トピック
アクティブな外乱の抑制の制御
- アクティブな外乱の抑制の制御
ダイナミクスおよび外乱が不明なプラント用の外乱の抑制コントローラーを設計する。 - Design Active Disturbance Rejection Control for Water-Tank System
Design ADRC for a water-tank model and compare performance against a gain-scheduled PID controller. - Design ADRC for Multi-Input Multi-Output Plant
Design ADRC for a pilot-scale distillation column MIMO model and compare performance against a model predictive controller. (R2023b 以降)
外乱補償
- Control Design and Disturbance Compensation Using Extended State Observers
Estimate and compensate for disturbances and unknown dynamics in linear time-invariant or linear time-varying systems. (R2024a 以降) - Apply Extended State Observer for Reference Tracking of DC Motor
Improve the disturbance rejection performance of a PID controller using the Extended State Observer block. (R2024a 以降) - Compensate for Disturbances in Spring-Mass-Damper System
Compensate for disturbances in a spring-mass-damper system using the Disturbance Compensator block. (R2024a 以降)
Ultra-Local Model
- Ultra-Local Model for Disturbance Estimation and Compensation
Estimate disturbances and unmodeled dynamics using ultra-local model. - Ultra-Local Model for System Identification and Output Prediction
Use the Ultra-Local Model block for system identification and output prediction. - Intelligent PID Using Ultra Local Model for Ball on Beam Balance
Implement model-free intelligent PID control technique using ultra-local model.
コード生成
- Deploy Controller for SEPIC Converter for PIL Testing
Set up processor in the loop (PIL) testing and profiling of an active disturbance rejection controller for a SEPIC converter. (R2024b 以降)
関連情報
注目の例
Design Active Disturbance Rejection Control for BLDC Speed Control Using PWM
Design ADRC for a brushless DC motor speed controller using pulse width modulation.

Design Active Disturbance Rejection Control for SEPIC Converter
Design ADRC for a SEPIC converter model and compare performance against a PID controller tuned on a linearized model.

Design Active Disturbance Rejection Control for Boost Converter
Design ADRC for a boost converter model and compare performance against a PID controller tuned on a linearized model.
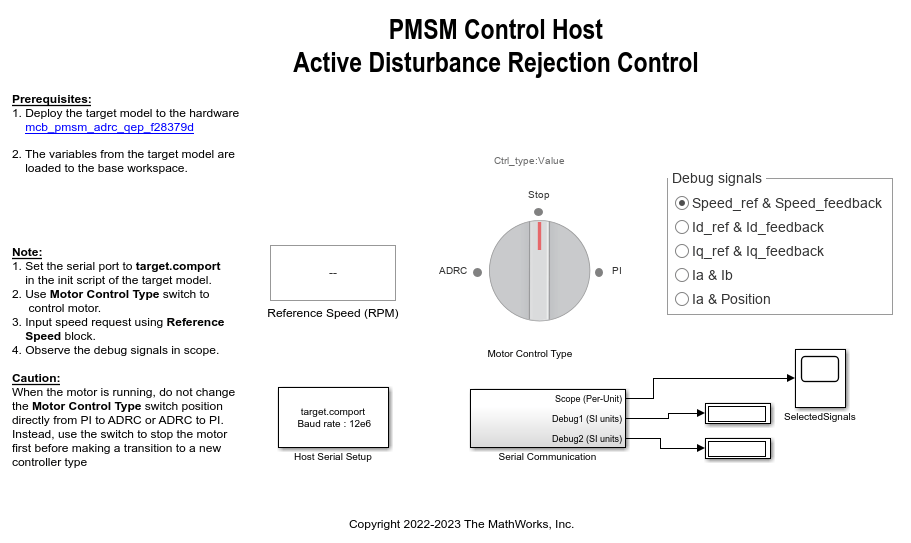
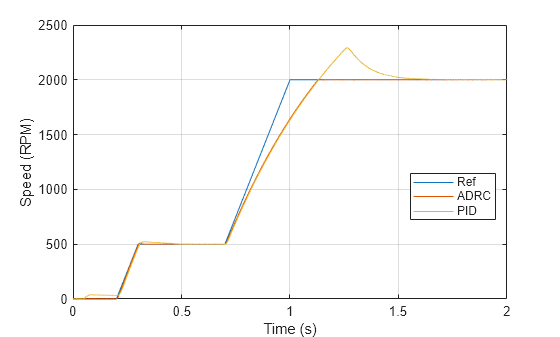
Implement PMSM Speed Control Using Active Disturbance Rejection Control
Implement active disturbance rejection control (ADRC) of the speed of a permanent magnet synchronous motor (PMSM) modeled in Simulink® using the Active Disturbance Rejection Control block. You can use the example to implement field-oriented control (FOC) using either a proportional integral (PI) or ADRC-based controller to run the motor in the speed control mode. Therefore, you can compare the performance of the PI and ADRC controllers.
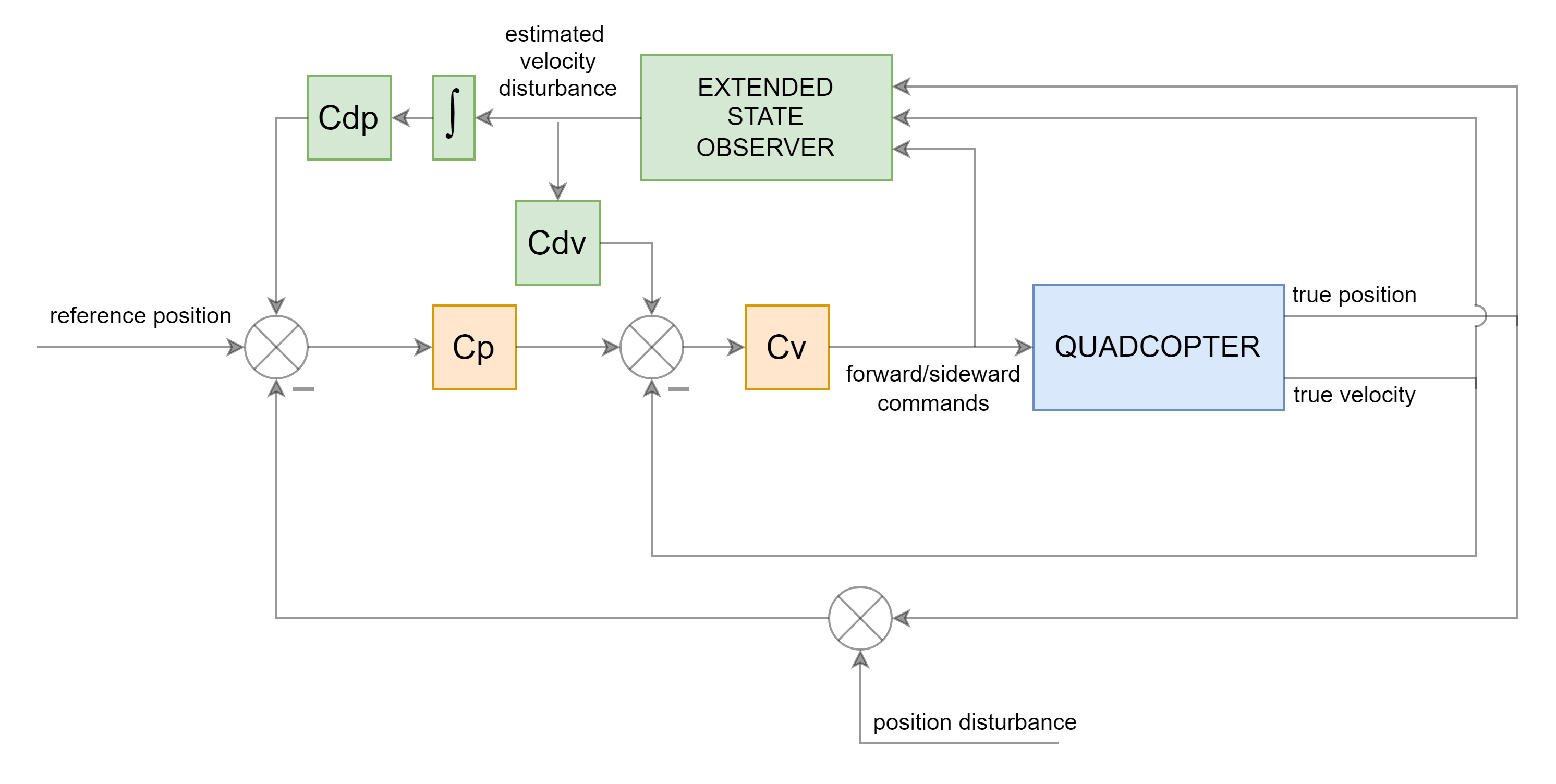
Mitigate GPS Errors in UAV Reference Tracking Using Disturbance Compensation
Mitigate GPS errors and improve tracking performance of a UAV using extended state observer.
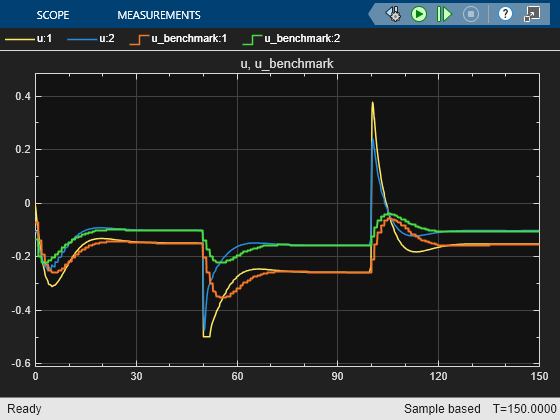
MPC with Disturbance Compensator for a MIMO Plant
Design MPC for a MIMO plant by first using a Disturbance Compensator block to cancel unknown dynamics and disturbances.