Active Disturbance Rejection Control
ライブラリ:
Simulink Control Design /
Adaptive Control
説明
Active Disturbance Rejection Control ブロックを使用すると、不明なダイナミクスおよび内部と外部の外乱があるプラント用にアクティブな外乱の抑制の制御 (ADRC) を設計できます。ADRC は、プラント ダイナミクスの近似のみを必要とするモデルに依存しない制御手法であり、ロバストな外乱の抑制を提供するコントローラーを設計します。
このブロックは、不明なダイナミクスと外乱をプラントの拡張状態としてモデル化するとともに、既知のシステム ダイナミクスの 1 次または 2 次のモデル近似を使用します。通常、動作範囲内のプラントの開ループ ステップ応答からこの次数を決定します。
1 次近似 —
2 次近似 —
ここで、以下となります。
y(t) はプラント出力です。
u(t) は入力信号です。
b0 は臨界ゲインです。これは、入力 u(t) に対するプラント応答を記述する推定ゲインです。
f(t) は外乱の合計です。これには、不明なダイナミクスおよびその他の外乱が含まれます。
ブロックは拡張状態オブザーバー (ESO) を使用して f(t) を推定し、モデル近似の既知の部分に対する推定された外乱の影響を低減することで、外乱の抑制制御を実装します。ADRC を調整するには、適切な時間領域、モデル タイプ、臨界ゲイン、コントローラーとオブザーバーの帯域幅、および初期条件を設定します。
詳細については、アクティブな外乱の抑制の制御を参照してください。
例
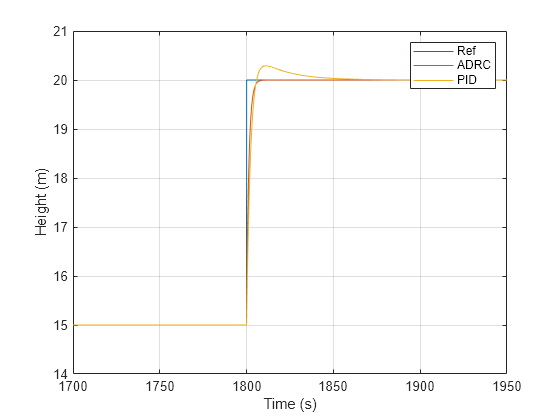
Design Active Disturbance Rejection Control for Water-Tank System
Design ADRC for a water-tank model and compare performance against a gain-scheduled PID controller.

Design Active Disturbance Rejection Control for Boost Converter
Design ADRC for a boost converter model and compare performance against a PID controller tuned on a linearized model.
Design Active Disturbance Rejection Control for BLDC Speed Control Using PWM
Design ADRC for a brushless DC motor speed controller using pulse width modulation.
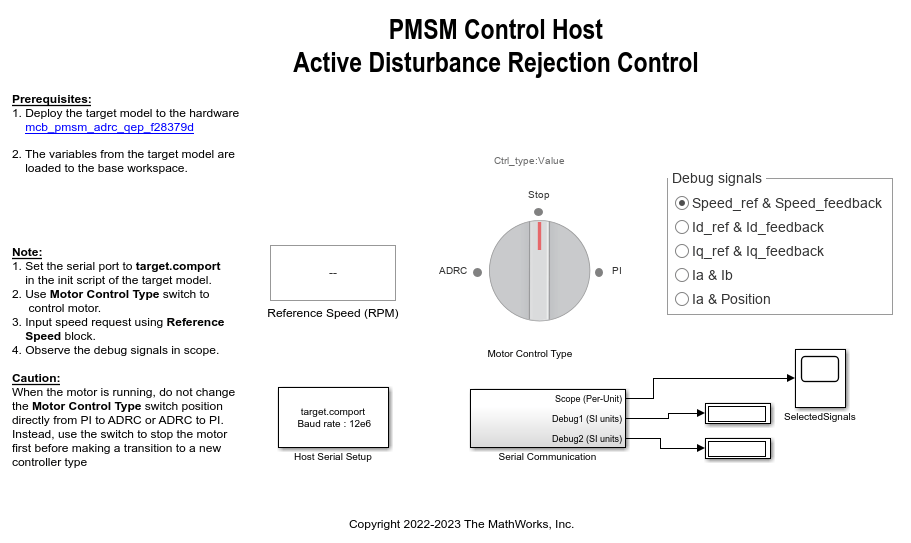
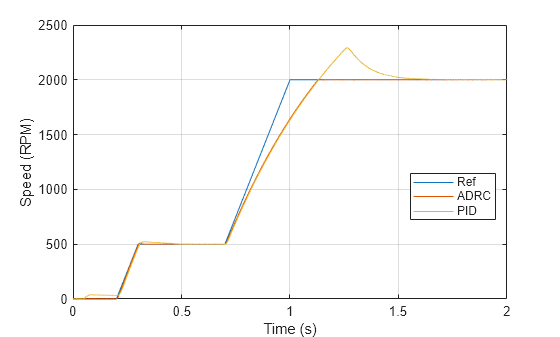
Implement PMSM Speed Control Using Active Disturbance Rejection Control
Implement active disturbance rejection control (ADRC) of the speed of a permanent magnet synchronous motor (PMSM) modeled in Simulink® using the Active Disturbance Rejection Control block. You can use the example to implement field-oriented control (FOC) using either a proportional integral (PI) or ADRC-based controller to run the motor in the speed control mode. Therefore, you can compare the performance of the PI and ADRC controllers.