このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
skyplot
衛星の方位角と標高データをプロットする
構文
説明
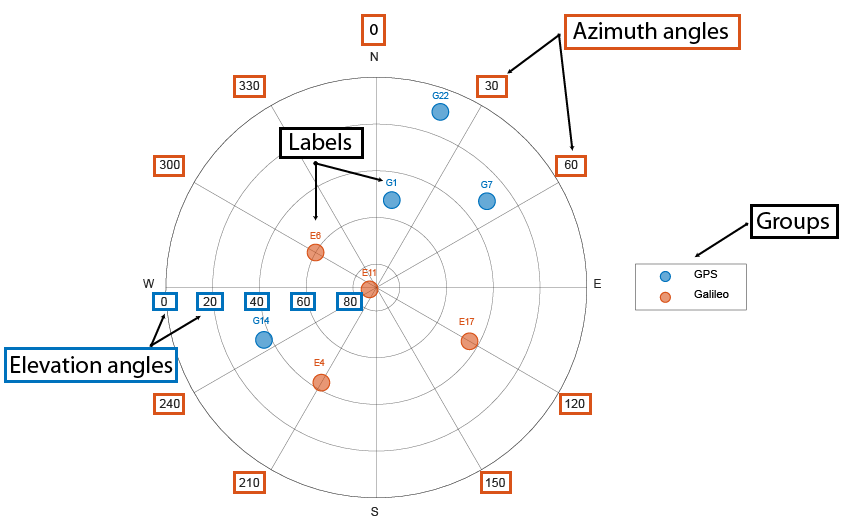
skyplot( は、度単位の行列として指定された方位角と標高データを使用してスカイ プロットを作成します。方位角角は度単位で測定され、北方向から時計回りが正になります。仰角は地平線から測定され、90 度が真上になります。スカイ プロットの要素の詳細については、スカイ プロットの主な要素 を参照してください。azdata,eldata)
skyplot( は、フィールド status)SatelliteAzimuth と SatelliteElevation を持つ構造体で方位角と仰角のデータを指定します。
skyplot(___, では、前の構文の入力引数に加えて、1 つ以上の名前と値の引数を使用してオプションを指定します。名前と値の引数は、Name,Value)SkyPlotChart オブジェクトのプロパティです。プロパティの一覧については、SkyPlotChart のプロパティ を参照してください。
skyplot( は、parent,___)parent によって指定された図、パネル、またはタブにスカイ プロットを作成します。
h = skyplot(___)SkyPlotChart オブジェクト、h として返します。チャートを作成した後、h を使用してチャートのプロパティを変更します。プロパティの一覧については、SkyPlotChart のプロパティ を参照してください。
例
GNSSセンサー モデルを gnssSensor (Navigation Toolbox) System object ™ として作成します。
gnss = gnssSensor;
センサーの位置と速度を指定します。センサーの読み取りをシミュレートし、可視衛星からステータスを取得します。方位角と仰角をベクトルとして保存します。
pos = [0 0 0]; vel = [0 0 0]; [~, ~, status] = gnss(pos, vel); satAz = status.SatelliteAzimuth; satEl = status.SatelliteElevation;
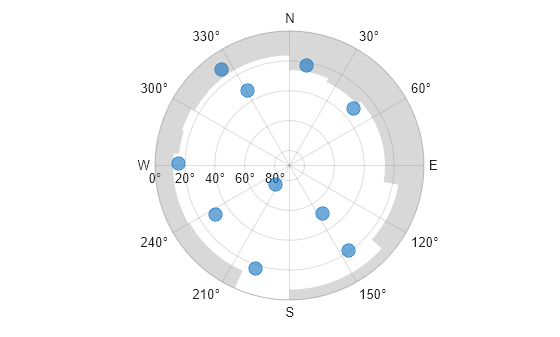
ローカル環境として機能する、最大仰角 30 度のランダムなローカル仰角マスクを作成します。
rng(8) terrainMaskElevations = 30*rand(1,12); % elevations (degrees) terrainMaskEdges = [0 24 48 100 132 180 204 240 276 288 300 312 360]; % azimuth edges (degrees)
標高マスクを使用して衛星の位置をプロットします。
skyplot(satAz,satEl,MaskElevation=terrainMaskElevations,MaskAzimuthEdges=terrainMaskEdges);
GNSSセンサーからの衛星位置の軌跡を時間の経過に沿ってアニメーション化します。
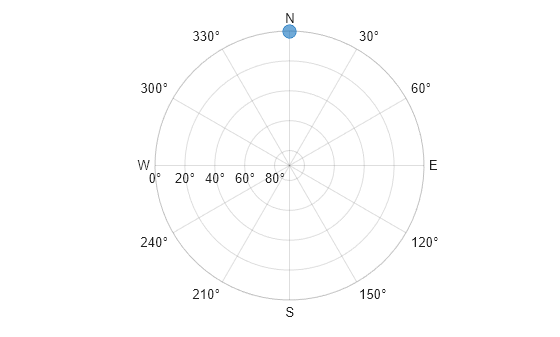
スカイ プロット図を初期化します。関連する時間ステップ情報を指定します。
skyplotHandle = skyplot(0,0);
numHours = 12; dt = 100; numSeconds = numHours * 60 * 60; numSimSteps = numSeconds/dt;
GNSSセンサー モデルを gnssSensor (Navigation Toolbox) System Object™ として作成します。
gnss = gnssSensor('SampleRate', 1/dt); 時間ステップを反復して、次の操作を実行します。
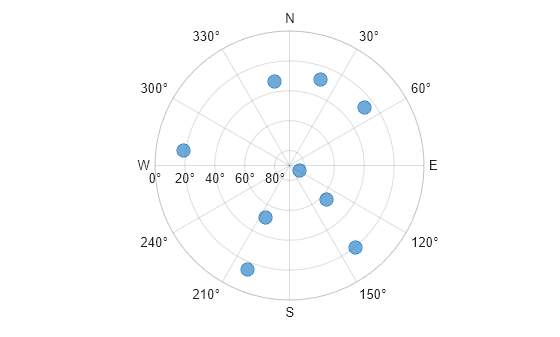
センサーの読み取りをシミュレートします。固定センサーのゼロ位置と速度を指定します。
方位角と仰角をベクトルとして保存します。
SkyPlotChartハンドルのAzimuthDataおよびElevationDataプロパティを直接設定します。
for i = 1:numSimSteps [~, ~, status] = gnss([0 0 0],[0 0 0]); satAz = status.SatelliteAzimuth; satEl = status.SatelliteElevation; set(skyplotHandle,'AzimuthData',satAz,'ElevationData',satEl); drawnow end
Adafruit® GPS衛星センサーによって生成されたログファイルから方位角と標高データを読み込みます。この例で提供されるデータには、各衛星の方位角と仰角、および疑似ランダム ノイズ (PRN) コードが含まれています。これらの値をベクトルとして保存します。
load('gpsHWInfo','hwInfo') satAz = hwInfo.SatelliteAzimuths; satEl = hwInfo.SatelliteElevations; prn = hwInfo.SatellitePRNs;
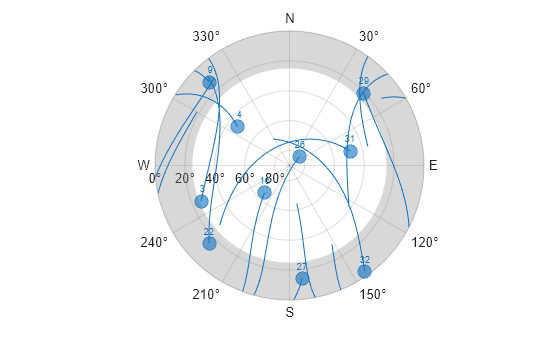
PRN コードに基づいて衛星を分離します。各位置をグループに関連付けるには、categorical 配列を作成します。この衛星セットでは、PRN が 32 未満の衛星のみが測位ソリューションに使用されます。
isUnused = (prn > 32); group = categorical(isUnused,[false true],["Used in Positioning Solution" "Unused"]);
衛星を可視化し、GroupData 名前値引数でカテゴリ グループを指定します。各ポイントのラベルとして PRN を指定します。凡例を表示します。
skyplot(satAz,satEl,prn,GroupData=group) legend('Used','Unused')

受信機の位置、RINEX ナビゲーション ファイル、マスク角度、時間ステップ サイズ、および RINEX ファイルからサンプリングするデータの時間数を指定します。
recPos = [42 -71 50]; navfile = "GODS00USA_R_20211750000_01D_GN.rnx"; maskAngle = 25; dt = 60; % seconds numHours = 4;
ナビゲーション ファイルを読み取り、ファイル内にキャプチャされたすべての衛星のGPSデータを取得します。
data = rinexread(navfile); [~,satIdx] = unique(data.GPS.SatelliteID); navmsg = data.GPS(satIdx,:);
開始時刻をナビゲーションメッセージの初期時刻に設定します。次に、時間ベクトル t を作成します。
startTime = navmsg.Time(1); secondsPerHour = 3600; timeElapsed = 0:dt:(secondsPerHour*numHours); t = startTime + seconds(timeElapsed);
方位角と仰角のベクトルを初期化します。次に、すべての衛星について、時刻 t に方位角と仰角のデータを収集します。
numSats = numel(navmsg.SatelliteID); allAz = NaN(numel(t),numSats); allEl = allAz; for idx = 1:numel(t) [satPos,~,satID] = gnssconstellation(t(idx),RINEXData=navmsg); [az,el,vis] = lookangles(recPos,satPos,maskAngle); allAz(idx,:) = az; allEl(idx,:) = el; end
高度が 0 未満の地平線の下にあるすべての衛星を欠落としてマークします。
allEl(allEl < 0) = missing;
スカイプロットを作成し、AzimuthData および ElevationData プロパティを更新して、衛星の軌跡をアニメーションとして表示します。
figure sp = skyplot(allAz(1,:),allEl(1,:),satID,MaskElevation=maskAngle); for idx = 1:size(allAz, 1) set(sp,AzimuthData=allAz(1:idx,:),ElevationData=allEl(1:idx,:)); drawnow limitrate end
入力引数
出力引数
詳細
バージョン履歴
R2021a で導入参考
関数
プロパティ
- SkyPlotChart Properties (Navigation Toolbox)
オブジェクト
gnssSensor(Navigation Toolbox) |nmeaParser(Navigation Toolbox)