空白のメッセージ
指定されたメッセージ タイプを使用した空白の ROS 2 メッセージの作成
ライブラリ:
ROS Toolbox /
ROS 2
説明
Blank Message ブロックは、選択された ROS メッセージ タイプに対応する Simulink® 非バーチャル バスを作成します。このブロックは、Publish ブロック、Subscribe ブロック、Call Service ブロックおよび Send Action Goal ブロックと連携して動作する ROS メッセージ バスを作成します。
例
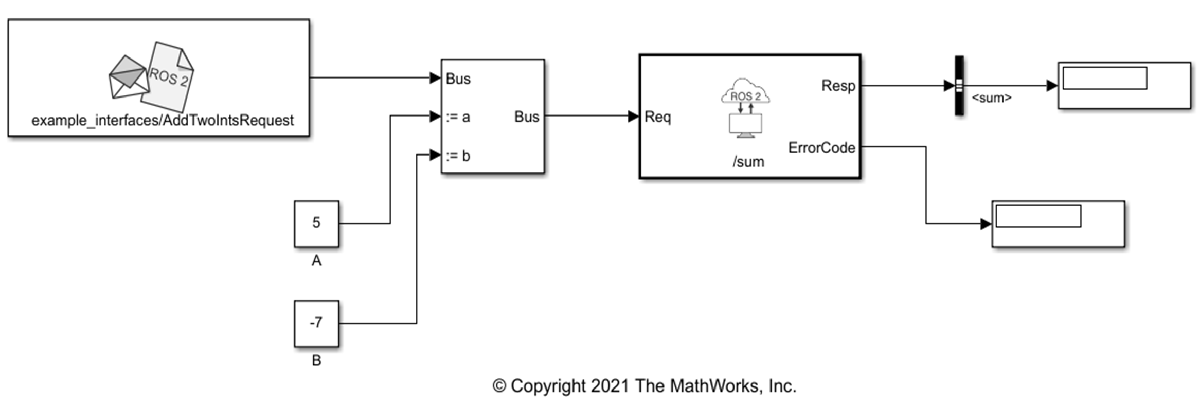
Call ROS 2 Service in Simulink
Call a service on the ROS 2 network in Simulink using the Call Service block and receive a response.
端子
出力
パラメーター
拡張機能
バージョン履歴
R2019b で導入