differentialDriveKinematics
差動駆動型ビークル モデル
説明
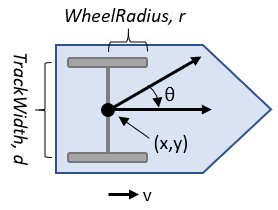
differentialDriveKinematics は、簡略化されたビークル運動をシミュレートする差動駆動型ビークル モデルを作成します。このモデルは、単一の固定車軸と、指定のトラック幅分離れた車輪をもつビークルを近似します。車輪は独立に駆動することが可能です。ビークルの速度と向きは、車軸の中央を基準に定義されます。ビークルの状態は、3 要素ベクトル [x y theta] として定義されます。グローバルの xy 位置をメートル単位で、ビークルの向き theta をラジアン単位で指定します。モデルについて時間微分状態を計算するには、入力コマンドと現在のロボットの状態を指定して、関数 derivative を使用します。
作成
構文
説明
kinematicModel = differentialDriveKinematics
kinematicModel = differentialDriveKinematics(Name,Value)
プロパティ
オブジェクト関数
derivative | ビークルの状態の時間微分 |
例
ロボットの作成
ロボットを定義して、初期の開始位置および向きを設定します。
kinematicModel = differentialDriveKinematics; initialState = [0 0 0];
ロボットの動作のシミュレーション
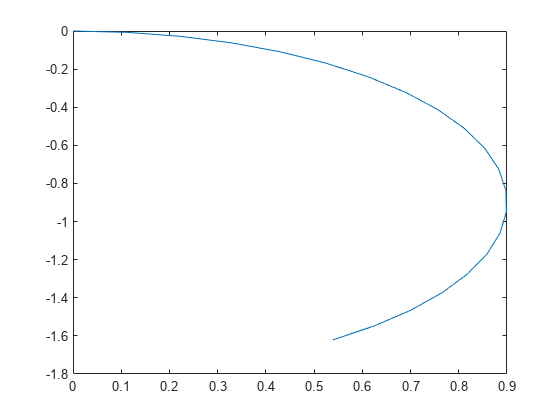
シミュレーションの時間範囲を 0.05 秒のタイム ステップで 1 秒に設定し、入力コマンドを左車輪に対して 50 ラジアン/秒、右車輪に対して 40 ラジアン/秒として右折に設定します。ode45ソルバーを関数derivativeで使用することにより、ロボットの動作をシミュレートします。
tspan = 0:0.05:1;
inputs = [50 40]; %Left wheel is spinning faster
[t,y] = ode45(@(t,y)derivative(kinematicModel,y,inputs),tspan,initialState);パスのプロット
figure plot(y(:,1),y(:,2))
参照
[1] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning, and Control 1st ed. Cambridge, MA: Cambridge University Press, 2017.