Differential Drive Kinematic Model
差動駆動の運動学モデルを使用したビークルの動きの計算
ライブラリ:
Robotics System Toolbox /
Mobile Robot Algorithms
説明
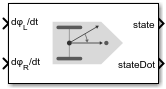
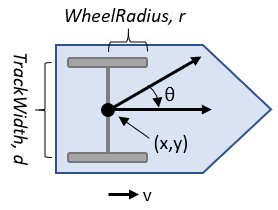
Differential Drive Kinematic Model ブロックは、簡略化されたビークル運動をシミュレートする差動駆動型ビークル モデルを作成します。このモデルは、単一の固定車軸と、指定のトラック幅 Track width 分離れた車輪をもつビークルを近似します。各車輪は速度入力 dϕL/dt および dϕR/dt を左右の車輪それぞれに使用して独立して駆動できます。ビークルの速度と向きは、車軸の中央を基準に定義されます。
例
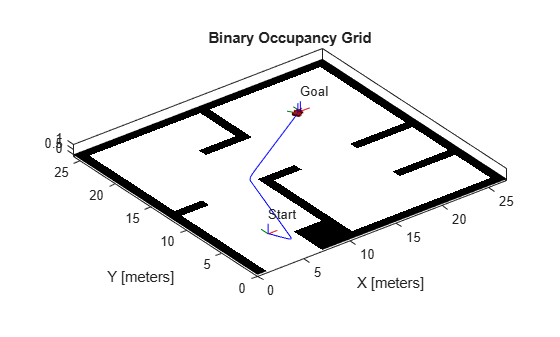
Simulink での差動駆動型ロボットのパスの計画
Simulink® で確率的ロードマップ (PRM) 計画と単純追跡制御を使用して、差動駆動型ロボットを障害物のないパスで動かす。
端子
入力
出力
パラメーター
参照
[1] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning, and Control 1st ed. Cambridge, MA: Cambridge University Press, 2017.
拡張機能
バージョン履歴
R2019b で導入