Ackermann Kinematic Model
アッカーマン運動学モデルを使用した乗用車型ビークルの動き
ライブラリ:
Robotics System Toolbox /
Mobile Robot Algorithms
説明
Ackermann Kinematic Model ブロックはアッカーマン ステアリングを使用する乗用車型ビークル モデルを作成します。このモデルは、距離 Wheel base だけ離れた 2 本の車軸をもつビークルを表します。ビークルの状態は、4 要素ベクトル [x y θ ψ] として定義され、グローバルの xy- 位置、ビークルの向き θ、ステアリング角度 ψ で指定します。ビークルの向きと xy 位置は、後車軸の中心で定義されます。角度はラジアン単位で指定され、グローバル位置はメートル単位で指定されます。ビークルのステアリング入力は、dψ/dt (ラジアン/秒単位) として指定されます。

例
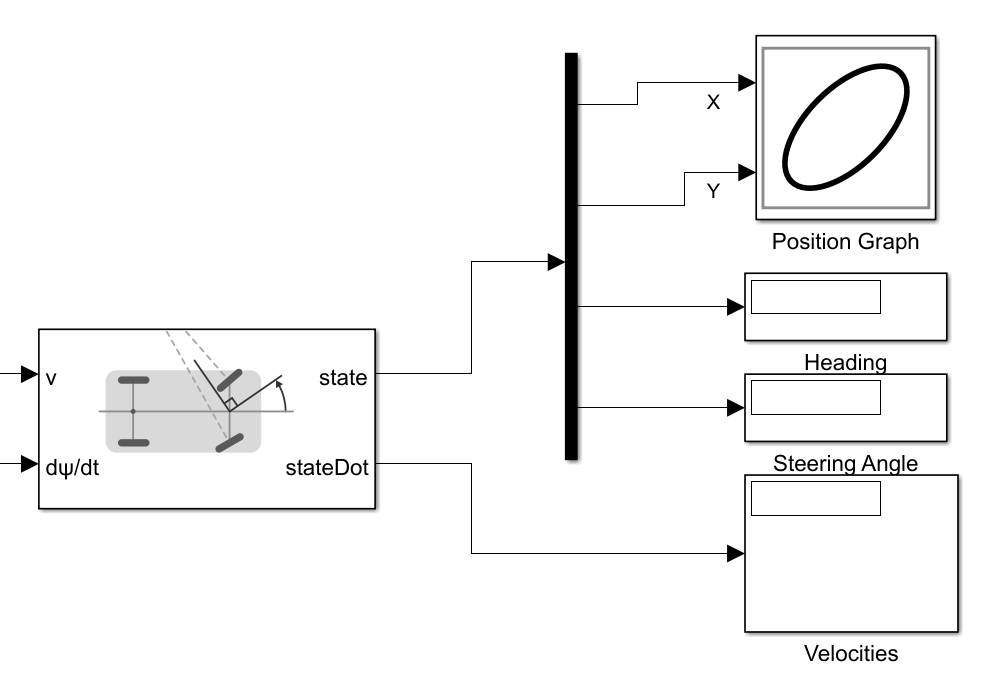
Simulink でのアッカーマン駆動ビークルのプロット
Ackermann Kinematic Model ブロックの位置をプロットし、そのビークルの速度とステアリング角速度をリアルタイムで変更する。
端子
入力
出力
パラメーター
参照
[1] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning, and Control. 1st ed. Cambridge, MA: Cambridge University Press, 2017.
拡張機能
バージョン履歴
R2019b で導入