Simulink でのアッカーマン駆動ビークルのプロット
この例では、Ackermann Kinematic Model ブロックの位置をプロットし、そのビークルの速度とステアリング角速度をリアルタイムで変更する方法を示します。
Simulink モデルを開きます。
open_system("plotAckermannDriveSimulinkModel.slx");Ackermann Kinematic ブロック
Ackermann Kinematic Model ブロックのパラメーターは既定値ですが、この例では重要なパラメーターとして [ビークル速度範囲] と [最大ステアリング角度] の 2 つに注目してください。どちらもビークルの運動を制限するパラメーターです。[ビークル速度範囲] パラメーターの下限は -inf、上限は inf に設定されているため、ビークルの速度として任意の実数値を設定できます。[最大ステアリング角度] は pi/4 に設定されているため、ビークルの最大回転半径に制限があります。
ビークルとステアリングの速度
Ackermann Kinematic Model ブロックは、ビークルの速度とステアリング角速度の 2 つの入力を受け取ります。このモデルでは "Slider Gain" ブロックを使用して入力を変更します。
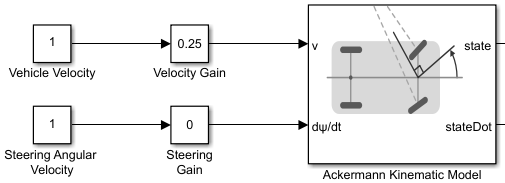
これらの値は、Ackermann Kinematic Model ブロックで設定されたパラメーター制約の範囲内の任意の実数値になります。
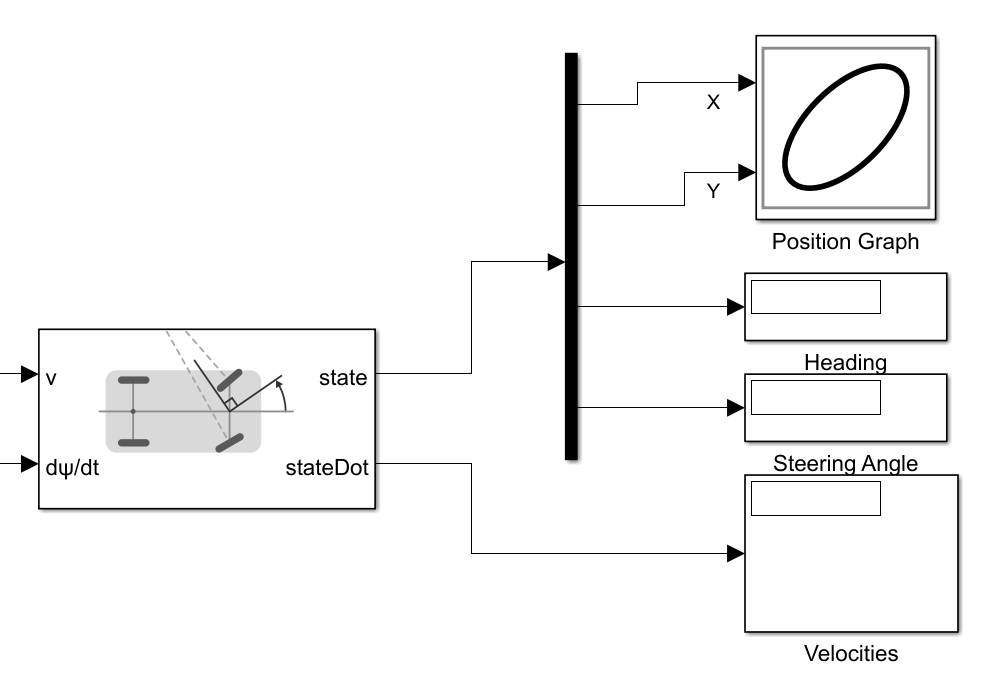
出力のグラフ化
demux ブロックを使用して、state 出力の x 信号と y 信号が "XY Graph" ブロックに接続されています。stateDot の信号と state の他の 2 つの信号は "Display" ブロックに接続されています。
モデルの実行
モデルの実行時間を
infに設定します。[再生] をクリックしてモデルを実行します。グラフが表示され、ビークルのパスを確認できます。
"Slider Gain" ブロックを開いてブロックの値を調整し、ビークルのパスへの影響を調べます。
グラフの範囲を必要に応じて調整します。
"Steering Gain" の値を調整しながら "Steering Angle" の表示を確認します。